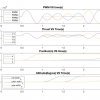
Four Motor Drone Dynamic model simulations The first simulation is performed with an ideal drone model. The PWMs for each motor were changed over time to achieve hover, z motion and roll, pitch and yaw motions. No noise were introduced in this simulation. Figure 1 shows the result of this simulati...

This week, Katya and I worked together to learn how to use Silhoutte Studio to make sure that this is the software we will be using for the Characterization of Physical Properties prelab that we are currently working on. We began by watching a YouTube video to learn how to use the software, the vi...
Last week, Katya and I continued working on the prelab for the characterization of the Aluminum coated plastic. The reason behind us doing this was to test the conductivity of the material as well as to analyze its physical properties. The document that we wrote is the following: prelab conductivi...
Over the course of the quarter I have been conducting a literature review on localization techniques that can be used for the lidar localization investigation. Progress in this area was slow at first was it was difficult to differentiate between the myriad of localization algorithms given different...
So far, Colo is functional to test and analyze cooperative localization. However, users need to modify the environment to add new algorithmn. I want to make it as a toolbox(python pakage) for users so that they just import it and use it. I have look into several simulation environment. Pymote is a...
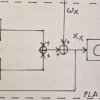
Over the past week I have been reformulating the Kalman filter implementation by given it a more formal representation such that the system can be fully understand and built upon. The image below shows the block diagram of the system from the highest level: The plant model is assumed to be kno...
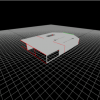
The SegBot in the interface This week, Prathyush and I worked on building the "SegBot" car in the mechanical interface. To do this, we had to fix/add multiple features, and there are still a few things left to do before the design is perfect. The two main obstacles if creating the car were adding...

Finally, the finger joints can be appropriately added into connection between selected subcomponents. The way we achieved this goal is to call specific arguments in make_output() function without adjusting our RoCo system. c.make_output(tabFace=maleFingerJoint,tabDecoration=maleFingerJointDecorati...
This week we have been trying to use Kinect to obtain the position of a Crazyflie. So far, we have found three well-documented methods to do so: Autopilot with Crazyflie Client This is by far the easiest methods and only requires a version of the client that supports Kinect. However, we had issu...
Since we are discussing the distributive Kalman filter based covariance intersection, we have to take a look at how it develops. The paper, named "Diffusion Kalman filter based on Covariance Intersection," is of great importance. The real contribution of this paper is not in the algorithm that the...