At the end of last year I had a constraint solving solution that did not scale well with complexity. It quickly became obvious that it would not suffice. Therefore, I began this year by tackling that problem once more. After trying a few more methods, we decided that the best solution would be to si...

Research into the use of MEMS actuators with malleable robots has moved along at a steady pace this quarter. Initial investigations started with an in depth look at straight line linkage systems that could be incorporated into the design.The straight line constraint is important due to the fact that...

For the past two quarters, the Robot Compiler (roco) team has been working on improving the roco codebase, cleaning up and documenting the code. As mentioned in my previous blog post, we set out with the goal of creating a codebase that was more easily understandable, extensible, and usable. Now, as...
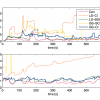
In this quarter, we finished this project aiming to provide a localization algorithm for multi robot system. First of all, we proposed a new algorithm that separates communication as an independent mechanism. By doing so, the algorithm is more robust to communication imperfection. In addition, in...
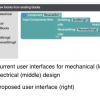
Our research group's flagship project, Robot Compiler, abbreviated RoCo, has come along a long way since our lab has launched. But can it be improved in terms of user experience? RoCo is basically an online tool that allows people without technical skills to create complex robots easily. Because w...

Andruino Andruino is a project that I started after the idea of a phone controlled paper robot got brought up in my research group. Smartphones are almost ubiquitous in our everyday life meaning that everybody has the means to provide a cheap paper robot with a collection of advanced sensors and a...

On the 27th of April, 2016, LEMUR had the grand opening of its lab and held an open house to showcase its research. The lab saw a number of visitors from curious undergraduates to professors. Us lab members had the opportunity to present our research to our visitors. The RoCo team demonstrated th...
We have been expecting the lab open house for so long. Finally, the lab is finished. There were so many people in that day, and it was a challenge to share the research progress with someone without EE/CS backgroud, like the architects of the lab. It is particularly difficult for me, since my post...

On April 14, 2017, LEMUR members attended the Southern California Robotics Symposium (SCR), a one-day technical conference that aims to bring together roboticists from around Southern California. This year's SCR took place in the Ronald Tutor Campus Center at USC, and had a large audience with a h...

Come to the grand opening of our new lab space in 1538 Boelter Hall, meet the members and learn about all the projects that they've been working on!