
In this experiment, we want to control vertical manuver the balloon of by controlling the fins. We took the fin control part of air swimmer clownfish balloon and integrated into our system. In the following video, we showed how to improve and integrate the fin controller into our system step b...
It took me a while to really understand the structure of the okvis SLAM system. In order to prevent from studying its structure all over again, it is better for me to put down what I understand so far. The main goal of this post is to bridge the gap between the theoretical understanding and the so...

Meaning of "in-situ design": Design objects with regard to real-world reference. (not focus on fabricability in the following suggested scenarios) Content of application scenarios below: Domestic interior design: furniture External design: architecture Large-scale design: space rocket mod...
I have added time remaining functionality to the power consumption board that I have. However, it is not refined and therefore has a few caveats for use. The program assumes that the battery is at full charge upon program start. While there is no current through the sensor, the time remaining wi...

Origami technique advantages: lightweight compact scalable etc Origami limitations: lack of structural stiffness malfunction caused by weight difficult to get satisfied design Examples Zhang et al. 2016: continuum robotic arm. This origami arm can prov...

This week i fabricate a defender balloon. It's made of two sphere balloon while there is net between them.
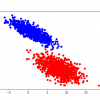
I'm upgrading my 1d binary hypothesis testing algorithm to sampling based n-d binary hypothesis testing algorithm: Right now, I'm verifing a sub-function "sampling from probability distribution - nd" using the following verification flowchart: I've finished 1-d test, moving on to 2-d test. T...
For the past week, I mainly focused on paper writing. Firstly, I worked with Chang to revise the paper, titled 'Computational Design and Fabrication of Corrugated Mechanismsfrom Behavioral Specifications'. We plan to submit the paper to IROS with RAL option. On the other hand, I am revising...
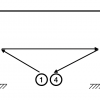
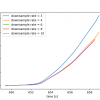
This week, I compare two different motor configuration as shown below. The test is run under the setup: A commander controls the blimp to touch both sides of the wall and then go to its starting position, the time cost is recorded. Each configuration of the motors will be tested 10 times...
I implemented the preintegration techniques from this paper. In order to implement the preintegration, the underlying optmization problem structure is also change. To be precise, previously, we optimize all the IMU data point, but now we only optimize the keyframe. The trajectory plot show t...