
Webots Environment CAD Based on Thursday's meeting with Daniel, I built the following environment modules: (Note: all modules can be scaled and rotated in Webots.) 1. Base: The base is the ground. Other modules will be laid on top of this base modules. I decide to use this base in case we want...
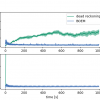
Following up with Alexie's post last week, we furthermore show that the simulation of BOEM SLAM algorithm for 1000 sec. The result is the average of 5 trials. The computation times for other algorithm, including optimization based and the EM SLAM, are too large for 1000 sec, but we have the comparis...

The previous handwriting derivation is in this link

Finished the version 2 blimp PCB design. This new design can now output 4 motors and 2 servo motors: schematics: board layout:

Finish learning the PCB board design and learn how to modify the board layout by changing the schematics:
As we discussed last Thu, there are two things to be done, so that our collaborators can have something to work on: Write a controller to make the paperbot go to a specific target location. Build an environment (manually for now) and apply it to Webots, and then replace it with Scenic late...
Webots controller After the meeting with Daniel, I made updates to the controller. Now the robot can go to a targeted location. Here is an example, with only P controller in it. Your browser does not support the video tag. Here is an example with PD controller TBD Webots try-out environm...
Some updates: Location of motor axis (anchor point & wheel relative locations) have been calculated. A simple controller is added to move the paperbot. Your browser does not support the video tag. Trying to write down all RoCo-extracted information into Webots program. The plan is...
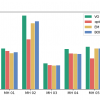
We compare 3 different SLAM algorithms on EuRoC datasets. As for estimation accuracy, we can see that all SLAM algorithms can improve the accuracy upon the visual-inertial odometry VIO output. The optimization SLAM has the most consistent result, while all SLAM algorithms have comparable perform...