30
Jul
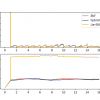
To complete the CoRL submission, I put all the simulation code here. The simulation code compares 4 algorithms, including EKF, LG-EKF, hybrid representation, and fully circular representation.
- «
- »
To complete the CoRL submission, I put all the simulation code here. The simulation code compares 4 algorithms, including EKF, LG-EKF, hybrid representation, and fully circular representation.