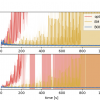
We simulate the BOEM algorithm against two other offline algorithms. Since these two algorithms requires a long time, we simulated them with sliding windows. In the first scenario, the block size of BOEM started with 9 sec, and grows geometrically. The sliding windows for both EM and optimizati...
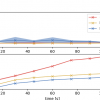
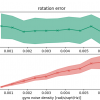
We simulation these SLAM algorithms with increasing duration. We can see that the estimation accuracy is comparable among 3 SLAM algorithms, but the processing times are different. The processing time is basically dominated by the optimization problem. The bigger the optimization problem, the long...
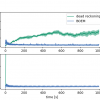
Following up with Alexie's post last week, we furthermore show that the simulation of BOEM SLAM algorithm for 1000 sec. The result is the average of 5 trials. The computation times for other algorithm, including optimization based and the EM SLAM, are too large for 1000 sec, but we have the comparis...
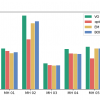
We compare 3 different SLAM algorithms on EuRoC datasets. As for estimation accuracy, we can see that all SLAM algorithms can improve the accuracy upon the visual-inertial odometry VIO output. The optimization SLAM has the most consistent result, while all SLAM algorithms have comparable perform...
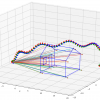
The optimization based SLAM formulate the optimization problem with two kinds of constraints. First, the pre-integrated IMU error establishes the constraints between two spatial states, or two poses. The other one is the reprojection error that links a spatial state and a landmark. In the optimizati...
Next task: The urgent tests need to be carried out is to find the real pose estimation result only by landmark points without uncertainty evaluate the influence of uncertainty to find the pose estimation effect based on probability map of features After that we can then to test the EM alg...
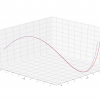
Purpose This blog is to pose optimization results of the IMU erro function in Tsangkai's project. In this test, I try to use simulation data to test the "imu_error" function to examine whether the code is right or not to perform optimization function. Input and output There are two tests. ...

The main paper we reviewed is the Probabilistic Data Association for Semantic SLAM It depicts a promising vista about the probablistic semantic slam. Primarily proposed an EM mathematical framework to consider the detection probabilistic, and using iterative multiply probability way to bring in f...
gitlablink Frame Introduction Body frame: IMU Coordinate Cam frame: Camera Coordinate World frame: The firt frame of IMU frames Navigation frame: ENU \((0,0,-9.81)\) Core Idea 1. Essential Members in IMU and Camera: imu_acc/imu_acc_bias/acc_noise_sigma/acc_bias_...
- «
- »