New Capabilities: Robot Compiler, RoCo is a sophisticated origam robot generator that a user can define how to cut and fold paper, and change design parameters with ease. I have been working on to export roco generated robot designs into physics simulation software, Webots, so that the user can fu...

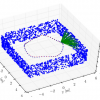
The below figure shows a ground truth body trajectory (gt, black) and ground truth landmarks (lmk, blue). The goal is to run a SLAM simulation using NLS optimization as the backend and vision as the front end. A dead reckoning signal (dr, red) is generated using an IMU (with noise) and feature point...

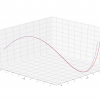
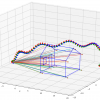
The below figures show the ground truth (gt, black), a noisy dead reckoning signal (dr, red), and an NLS optimization using the noisy dr as a seed, and IMU data to constrain relative motion. The above figure shows all trajectories, and landmarks (lmk, navy) and feature points (plmk, green). ...
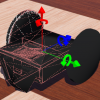
Currently working on the first step of a simulation for Tsang-Kai's SLAM project. A simulation will help verify landmark accuracy among other things beyond what can be demostrated using datasets. Ultimately we would like the simulation to look like the below figure [1] . The simulation setup...
Purpose This blog is to pose optimization results of the IMU erro function in Tsangkai's project. In this test, I try to use simulation data to test the "imu_error" function to examine whether the code is right or not to perform optimization function. Input and output There are two tests. ...
gitlablink Frame Introduction Body frame: IMU Coordinate Cam frame: Camera Coordinate World frame: The firt frame of IMU frames Navigation frame: ENU \((0,0,-9.81)\) Core Idea 1. Essential Members in IMU and Camera: imu_acc/imu_acc_bias/acc_noise_sigma/acc_bias_...
- «
- »