A cubic spline is a spline constructed of piecewise third-order polynomials which pass through a set of n control points. According to [1], a cubic spline \(S(x)\) can be defined as: \(S(x)\) is a cubic polynomial \(S_j(x)\) on [\(x_j,x_{j+1}\)], for all \(j = 0,1,...,n-1\). \(S_j(x) = a...

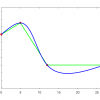
I finished the way point smoother optimization algorithm to replace B-spline curve algorithm to make sure the final smoother path will not collide with obstacles. The failure cases: After way point smoother optimization: Other cases using way point smoother optimization:
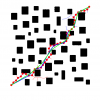
I used 13 maps as the testing maps and implemented my algorithm, parameters of these maps: map name size initial point coordinate goal point coordinate duty cycles warran 1108 * 1301 (740,297) (430,1013) 0.347 map 1 500 * 500 (10,10) (490,490) 0.2444 map 2 500 * 500...
- «
- »