
I have spent the past weeks assembling a blimp on which to test a feedback control system to aid in controlling the blimp as well as building said control system. The picture below shows the experimental setup. So far, the blimp is assembled and controlled based on IMU motion. The video below...

This past week I have developed a framework for motor feedback control using IMU (orientation) data. I first wrote scalable motor control software for interfacing with the tb6612. A quick test operation can be seen below. Motor Test: Your browser does not support the video tag. I then integr...
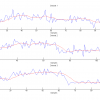
In order to improve the inertial measurement capabilities of the blimps on the Foray project, I have been working with Zhaoliang to implement various filtering algorithms for the altimeter data we collect. So far, I have used Matlab to create both an exponential filter and a moving average filter....

Knowledge of a lighter-than-air vehicle's orientation is an essential initial step in ensuring stable operation. I have been working on implementing a sensor fusion system for the blimps on the FORAY project. The current implementation uses a 6-DOF IMU, the MPU6050. The experimental setup can be...

This week I managed to integrate the system of the blimp and conducted a flying test. 1. System Overview Micro controller: NodeMCU ESP8266 board Motor driver: TB6612 Motor: 53,000 rmp motor Propeller: 65mm propeller Gondola: 3D printed Sticking method: Hook and loop tape 2. Control...
- «
- »