This past week I have developed a framework for motor feedback control using IMU (orientation) data. I first wrote scalable motor control software for interfacing with the tb6612. A quick test operation can be seen below.
Motor Test:
I then integrated the IMU software with the motor control software and added functionality for motors to be driven based on the IMU's orienation (currently only a proportional controller is implemented). The experimental setup and operation can be seen below.
Setup:
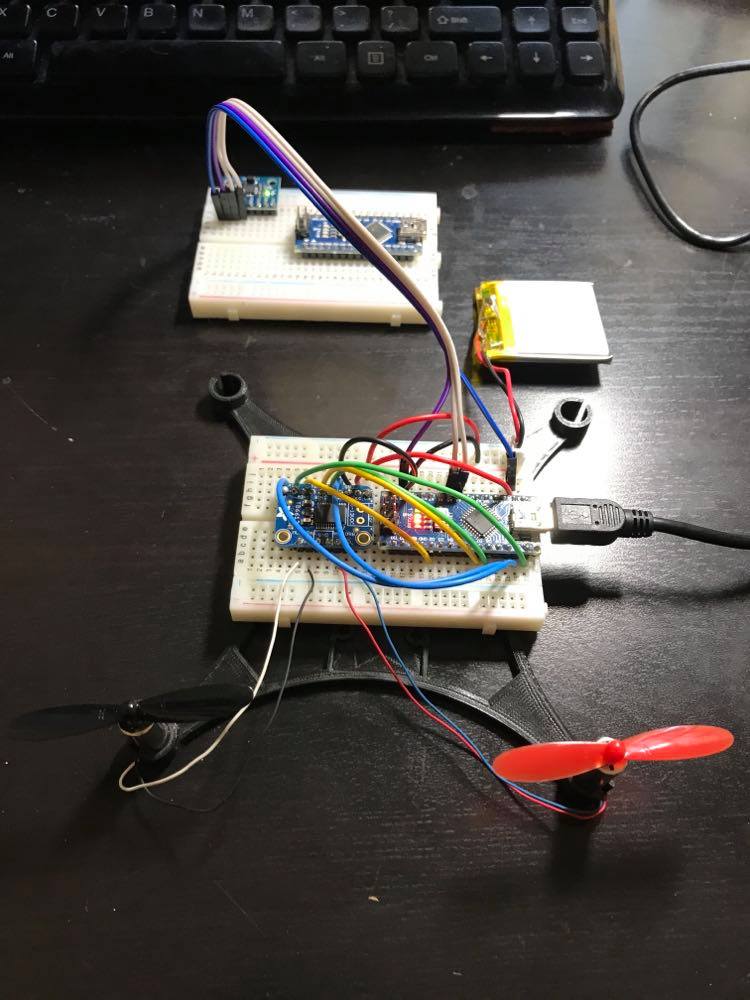
Operation:
This software is currently just a framework and the the final placement of motors on the blimp (as well as the blimp's shape) will affect the dynamics of the system. After the blimp is built, gains will have to be selected.