I followed the following tutorials to get a crazyflie quadcopter set up and tested: https://www.bitcraze.io/documentation/tutorials/getting-started-with-crazyflie-2-x/ https://www.bitcraze.io/documentation/tutorials/getting-started-with-expansion-decks/ https://www.bitcraze.io/documentation/tu...
Purpose This blog is to pose optimization results of the IMU erro function in Tsangkai's project. In this test, I try to use simulation data to test the "imu_error" function to examine whether the code is right or not to perform optimization function. Input and output There are two tests. ...
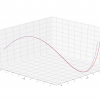
This past week, I focused on improving upon the altitude filtering algorithms I had tested previously for the blimps on FORAY. The previous two algorithms I had implemented (both in arduino and in MATLAB) were a moving average filter and an exponential filter (both first-order filters). Both intro...

I have spent the past weeks assembling a blimp on which to test a feedback control system to aid in controlling the blimp as well as building said control system. The picture below shows the experimental setup. So far, the blimp is assembled and controlled based on IMU motion. The video below...

This past week I have developed a framework for motor feedback control using IMU (orientation) data. I first wrote scalable motor control software for interfacing with the tb6612. A quick test operation can be seen below. Motor Test: Your browser does not support the video tag. I then integr...
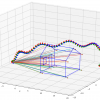
gitlablink Frame Introduction Body frame: IMU Coordinate Cam frame: Camera Coordinate World frame: The firt frame of IMU frames Navigation frame: ENU \((0,0,-9.81)\) Core Idea 1. Essential Members in IMU and Camera: imu_acc/imu_acc_bias/acc_noise_sigma/acc_bias_...
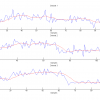
In order to improve the inertial measurement capabilities of the blimps on the Foray project, I have been working with Zhaoliang to implement various filtering algorithms for the altimeter data we collect. So far, I have used Matlab to create both an exponential filter and a moving average filter....

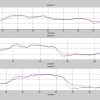
Knowledge of a lighter-than-air vehicle's orientation is an essential initial step in ensuring stable operation. I have been working on implementing a sensor fusion system for the blimps on the FORAY project. The current implementation uses a 6-DOF IMU, the MPU6050. The experimental setup can be...
- «
- »