Purpose
This blog is to pose optimization results of the IMU erro function in Tsangkai's project. In this test, I try to use simulation data to test the "imu_error" function to examine whether the code is right or not to perform optimization function.
Input and output
There are two tests.
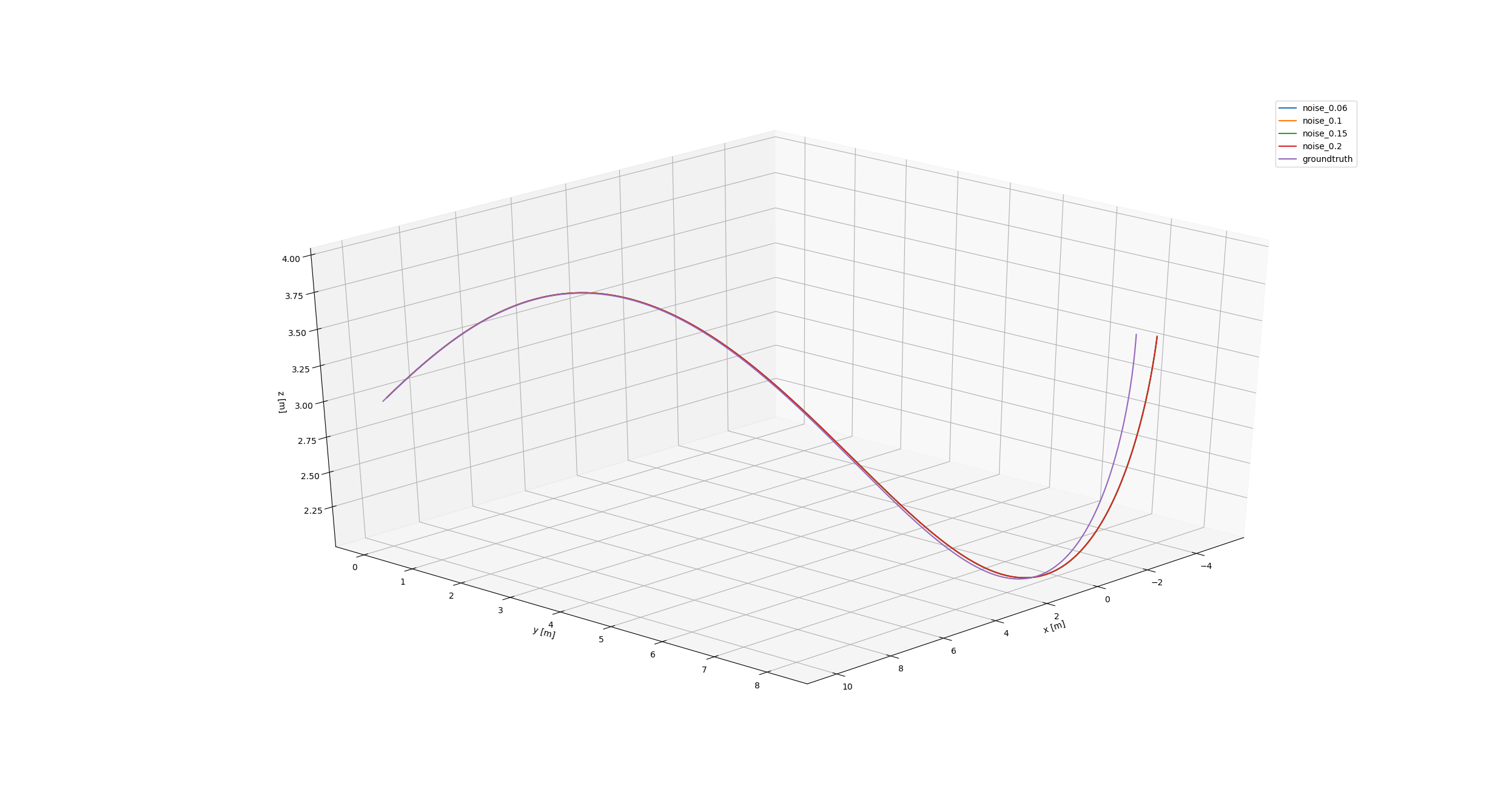
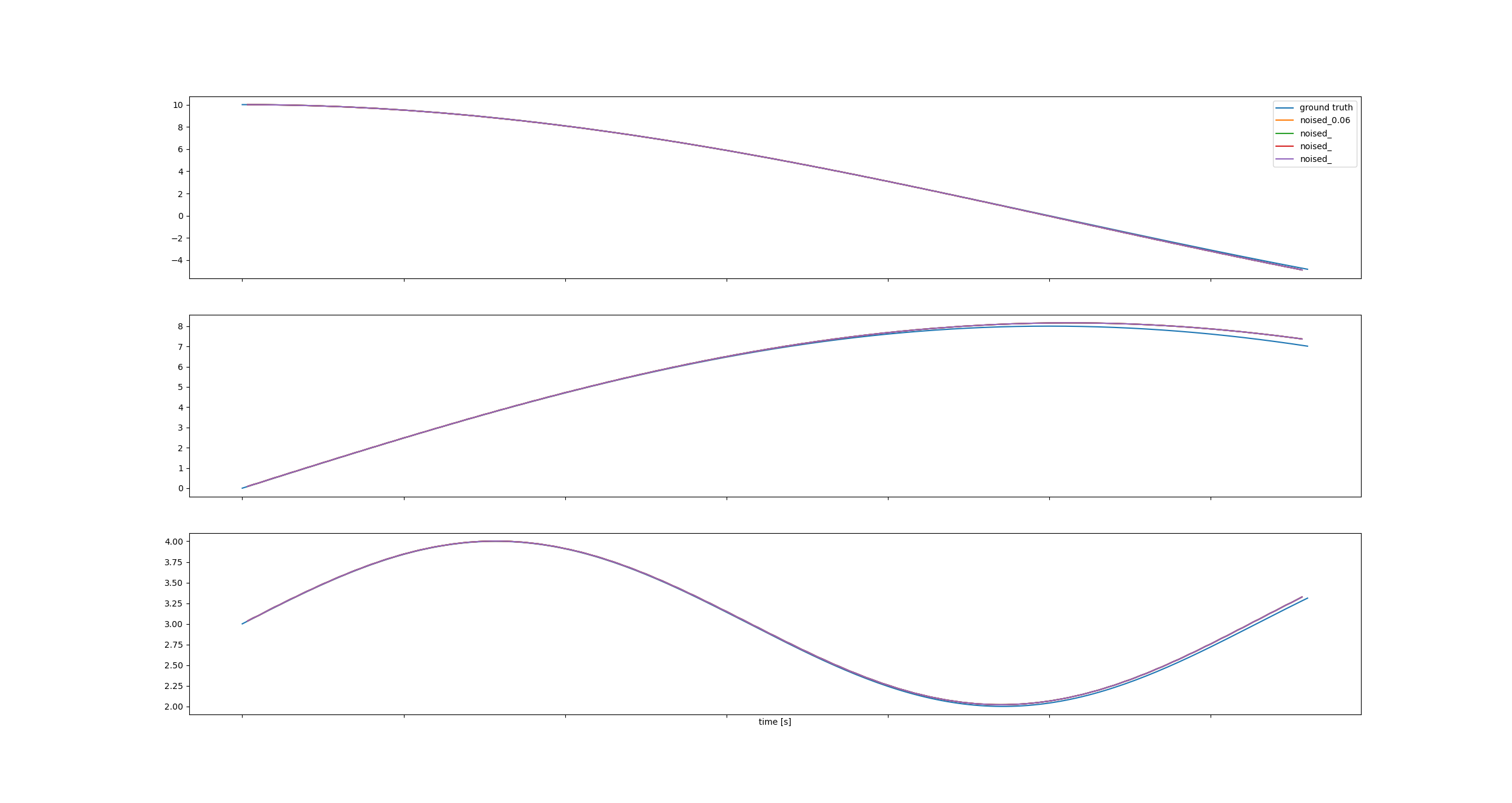
Input in first one is to set initial value of optimization with the noised groundtruth. It means I added noise on groundtruth as initial value into the optimzation algorithm.
Input in second one is to set initial value of optimization with the noised dead reckoning. It means I added noise on dead reckoning as initial value into the optimzation algorithm.
Appendix
Test 1: noised groundtruth as initial value
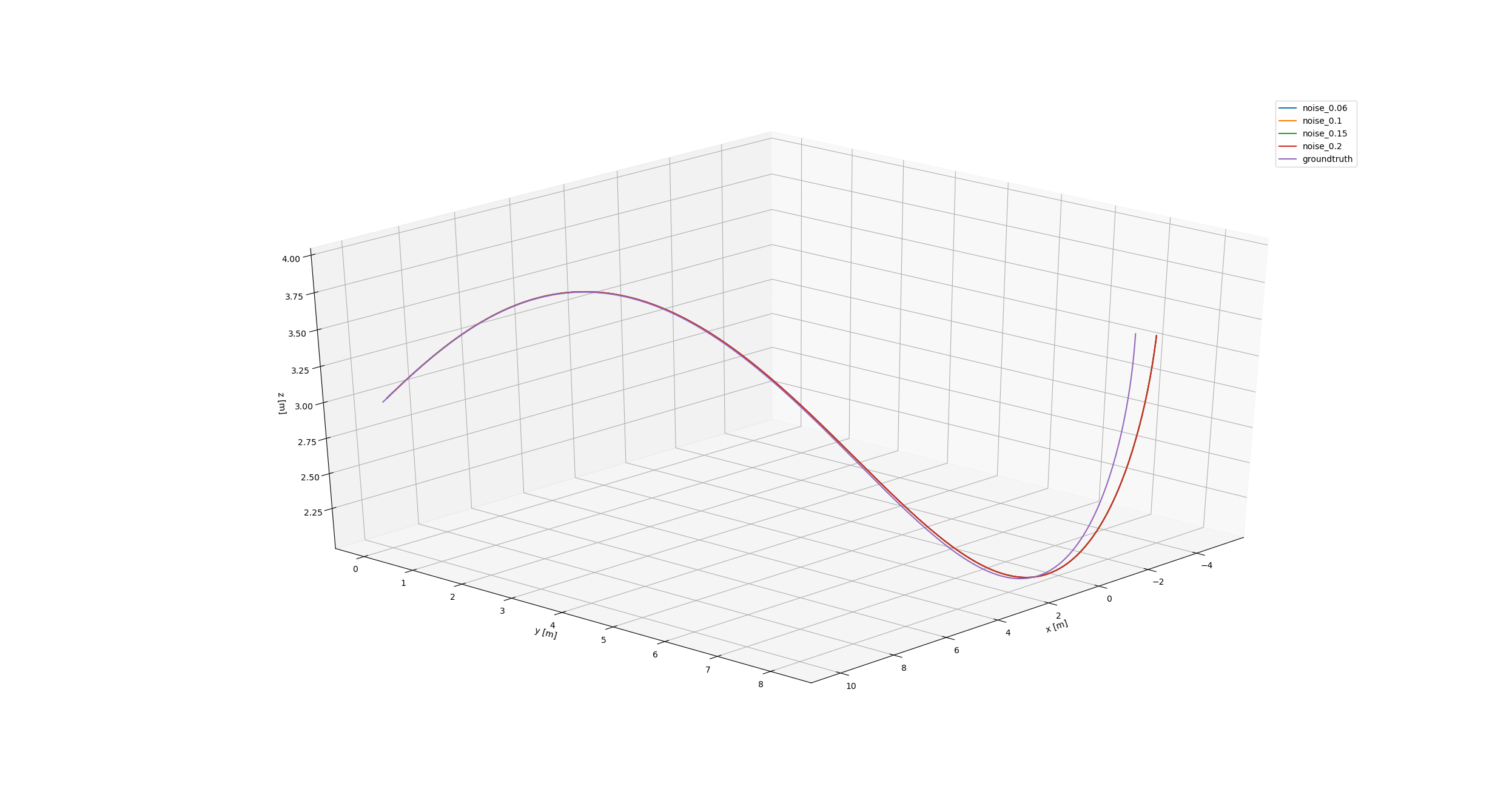
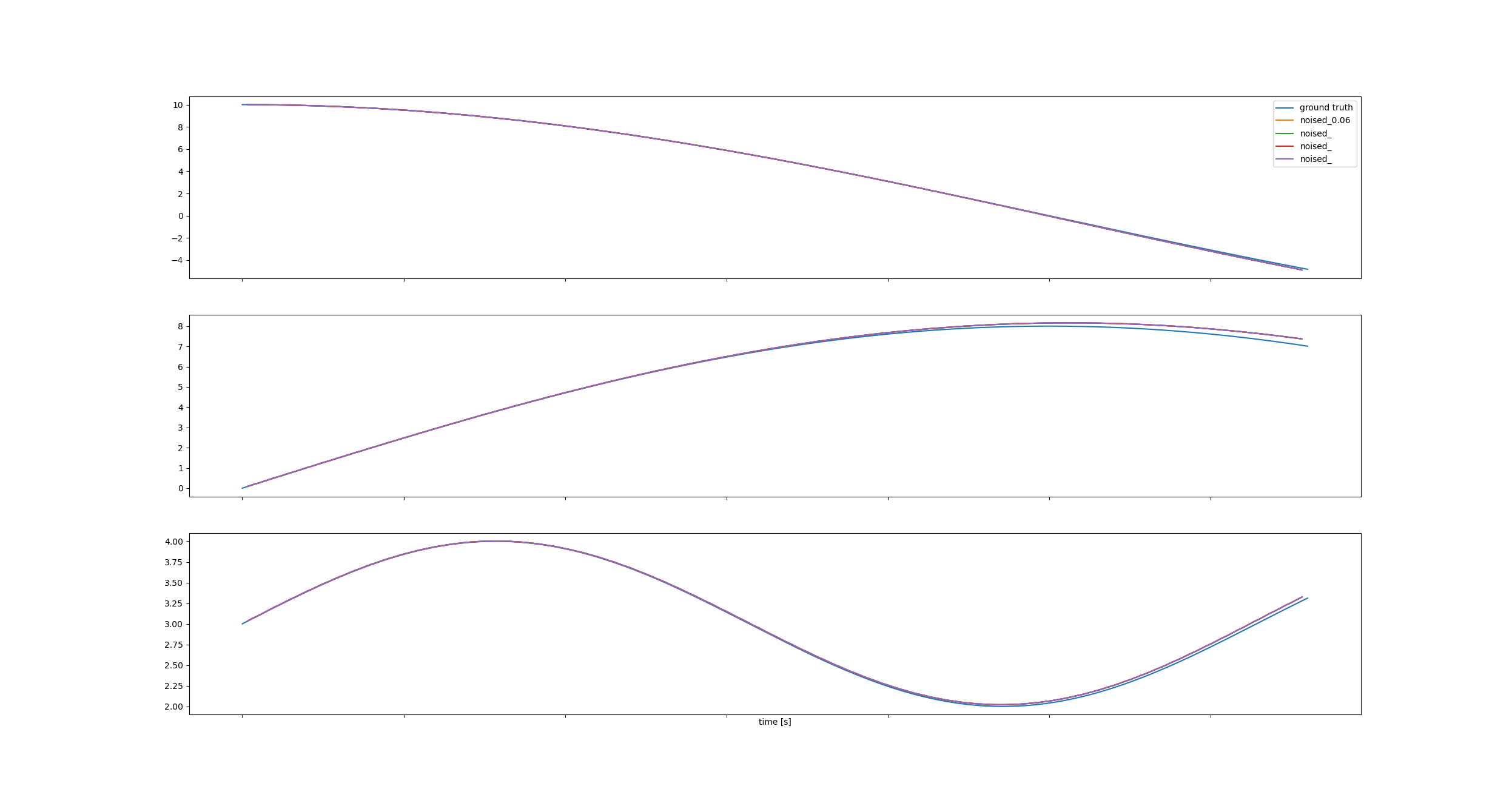
Test 1: noised dead reckoning as initial value