In the past 2 weeks, I tried to develop and algorithm that can be used if we have a blimp that have a camera facing down. With the camera, we would be able to detect the field of interest and control the robots within the field. In this case, the current algorithm can be used to control any vehicle...
Yesterday, Jill and I were able to successfully integrate the mesh network with three of her paper cars. We were testing the ability to send instructions to multiple vehicles over the network. Since our 433 MHz packet radios in tests would send messages within three milliseconds and the painlessMesh...

This week, our team of summer undergrads began planning the integration of all of our projects together into one big integrated demo. So, I had to start making my networking code and hardware easy to add into and use in my peers’ projects. To do so, I switched from using the small 433 MHz packet rad...
Last week, the two biggest things that we accomplished were making one node in the mesh network into an MQTT bridge, which would connect to an MQTT broker to be able to use the dash with the mesh network, as well as set up the RFM69HCW 433 MHz packet radios into a unicast mesh network. So, using t...

Last week, I set up the RFM69HCW 433 MHz radio hardware to be able send messages from one radio to the other. Below is a picture of the set up. I have the 433 MHz packet radio on a breadboard and connected to an ESP32 Feather Board, as well as attached to a quarter-wavelength antenna (about 17 centi...

This week, I used the painlessMesh library to create a very simple mesh network of three nodes. I wrote the code to resemble how I believe our blimps/ RoCo robots should use the network once they are automated: they send instructions to one another that is interpreted in a switch statement, these in...
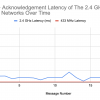
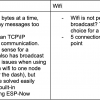
This week I wanted to test the performance of different protocols and mesh-networks. The two biggest characteristics I wanted to determine were range and throughput. My first test was the ESP-Now protocol, which is a peer-to-peer communication protocol near 2.4 GHz. Outside, with a line of sight, I...
Over the past week, I have been looking into what are the best tools/ways to create a mesh network for our ESP32 boards that will be attached to the blimps. The three frequencies we want to add to diversify are 2.4 GHz, 433 MHz radio, and mmWave 20 GHz. For the 2.4 GHz option, ESP-now looked like...
- «
- »