RoCo demonstration brainstorming We came up with some challenging problems for RoCo demo and we will keep brainstorming. (Thank you Nabeel and Mauricio) Here are some ideas (currently focusing on Paperbot, will extend to other robots later on): Robot going through large ridges or bumps: robot...

Webots Environment CAD Based on Thursday's meeting with Daniel, I built the following environment modules: (Note: all modules can be scaled and rotated in Webots.) 1. Base: The base is the ground. Other modules will be laid on top of this base modules. I decide to use this base in case we want...
As we discussed last Thu, there are two things to be done, so that our collaborators can have something to work on: Write a controller to make the paperbot go to a specific target location. Build an environment (manually for now) and apply it to Webots, and then replace it with Scenic late...
Webots controller After the meeting with Daniel, I made updates to the controller. Now the robot can go to a targeted location. Here is an example, with only P controller in it. Your browser does not support the video tag. Here is an example with PD controller TBD Webots try-out environm...
Some updates: Location of motor axis (anchor point & wheel relative locations) have been calculated. A simple controller is added to move the paperbot. Your browser does not support the video tag. Trying to write down all RoCo-extracted information into Webots program. The plan is...
Trying to get actuation location from RoCo. Method 1: Write a new code for it Steps: Get motor information from .yaml file (e.g. "fs90r") Refer to dimensions.py for motor geometry information (e.g. "hornlength" etc) Refers to system input for "length", "width" and "height" for "bodylen...

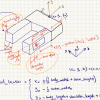
Here is what we will need to extract from RoCo in order to construct simulation in Webots Updates In the above graph, green boxes have been implemented in RoCo. Now, for each component, we can extract vertices coordinate, facet normal, and coordinate index from RoCo. Example 1: for compone...

Updates: RoCo can save components separately, in .stl files Coordinate can be saved in .wbt required format in .txt files Facet normal can be saved in .wbt required format in .txt files Details Coordinate points of each component have been saved. Example: RoCo-Saved-Coord (left)...
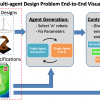
"LOGiCS is a project funded by the DARPA program on Symbiotic Design of Cyber-Physical Systems. The aim of the project is to develop design tools and techniques that augment human designers with an AI co-designer towards achieving significant improvements in design productivity as well as design 'su...