Trying to get actuation location from RoCo.
Method 1: Write a new code for it
Steps:
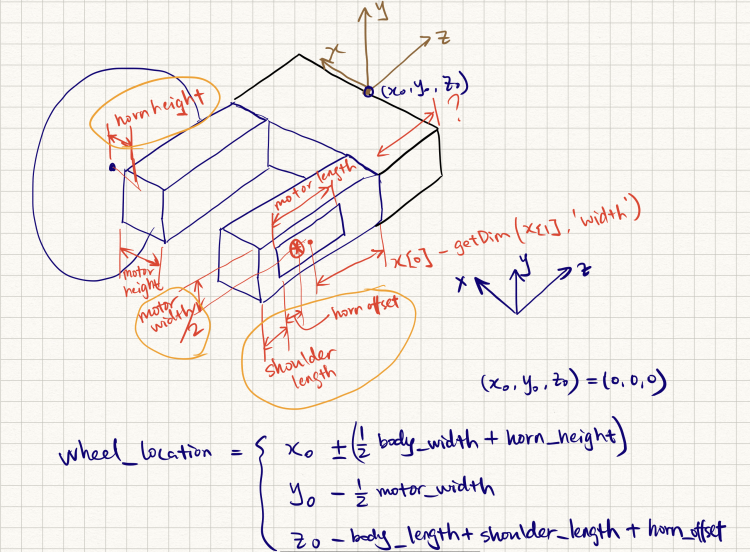
- Get motor information from .yaml file (e.g. "fs90r")
- Refer to dimensions.py for motor geometry information (e.g. "hornlength" etc)
- Refers to system input for "length", "width" and "height" for "bodylength" etc
- Plug in numbers to get wheel locations (same as anchor point)
Pros:
- Straight forward
Cons:
- May not be applied to other type of robots