For my current work, I'm trying to put context into sensor selection problem. To do this, we need to ask What does context mean in your scenario? (How do you define this - definition) I don't think I can use linear Kalman filter to integrate the context in this problem. Let's say we have measur...
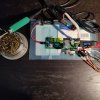
It's been a while since the last update, but lots of boards have been getting built, new features implemented and tested, and general fun had all around. Perhaps some of those details will be a post for another day. The most interesting board this time around is the IoT soldering iron: To be mor...
In this blog post, I described several problem formulations I'd like to solve. I started with easy formulation(Discrete linear time-invariant system) that would be extended to more complicated formulations such as non-linear examples. Step 0. Preliminary knowledge \(x(k+1) = Ax(k) + w(k), \ w...
It's been a (long) while since the last blog update on this project, and it's been a chaotic last few months where a lot has happened (and a lot is still happening!) But the headline item is that I've been moving more towards a release of this project and gave a talk at Open Hardware Summit - see...
Zeem Summary: Zeem Summary.pdf Summary of other papers: Presentation.pdf


Summary:\ In this project, there is a netowrk of SWOT satellites with 5 altimeters satellites and 1 camera satellite running on different orbits. Each of them has different sensor to detect the ground points of the river. The goal is to decide whether the flood happens or not. For our part, we w...

The last two weeks have been conference season, with a demo at UIST and a paper at SCF (Symposium on Computational Fabrication). In particular, if you're been following the prior posts on array ports and multipacking, that's the topic of the paper and it's presented in a much more unified and...

While the circuit board HDL compiler and examples have been open-source since we published our UIST'20 paper, we've only recently started rapidly building examples and been able to get the libraries to where this whole system could be more widely used. And as part that push towards release, we've...

Last week was the SoCal Robotics Symposium, which we hosted at UCLA. I was on the organizing committee, and one of the things I did was nametags. The simple way would probably be to type each one in something like MS Word by hand, and for an event of around 200, that probably would be feasible. B...