This week, I was working on the following tasks: Formal analysis of a new motion planner with theoretical guarantees in terms of computation Survey of other motion planning algorithms using trajectory optimization. Although I was able to understand pros and cons of my new motion planner, I sti...
I was working on the following things this week: Proof sketch of new motion planner algorithms in terms of sub-optimality Finalize the paper, which was recently accepted for RA-L! Participated in ICRA conferences, where I could communicate the authors of other great papers. In particular, I wa...
For the past one month, I have been working on the prospectus writing for my qualifying exam at the end of this June. Specifically, last week, I was drafting the Future Work chapter for the prospectus and am very close to finish it. I will spend a several days working on it and send it out to group...
Last Updated March 29, 2020. The COVID-19 Crisis is rapidly evolving, so this information may become out of date The COVID-19 virus first originated in Wuhan, China, in late December of 2019, and has become a global epidemic. Thus, due to the fact that LEMUR Lab has a high end laser cutter, and...
For last week, I fiinshed the ABSTRACT and INTRO sections for the paper. For the upcoming week, the Conclusion and Future Work will be completed to have the first draft with some pictures updated. Hence, this week, I will do the final editting and demos fabrication and picture update.

I attached the Leap Motion device onto HTC Vive headset, and tested Leap Motion's default hand tracking features. The assembled device is shown here: And I recorded a video for hand tracking tests: see from youtube link or mp4 file The technology in Leap Motion camera is infrared detection...
I read six papers suggested by CHI 2019 reviews related to the previous VR-AR in-situ design project: Christian Weichel, Manfred Lau, David Kim, Nicolas Villar, and Hans W. Gellersen. 2014. MixFab: a mixed-reality environment for personal fabrication. In Proceedings of the SIGCHI Conference on Hum...

The paperbot prototype was built based on the fabrication drawing generated from roco_electrical package Fabrication process Result from cutter Test before fully folding the robot Appearance after fully folded
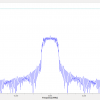
Start a simple test run with our setup. we have an TX on top of the roomba and two RX on the edge of the foam, TX is transmitting signal at 915MHz. We can see from the video, as the robot is approaching the RX, it received signal with higher power, which make sense intuitively. The attached is the t...
We have implemented a kinematic controller to guide the Roomba to a series of setpoints. OptiTrack is completing the feedback loop with the Roomba, communicating its groundtruth at about 120 Hz. We are calculating the errors in angle and distance using linear transforms. There are still some improve...