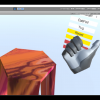
Objective: Detect gesture as tuning gesture Find discrete parameter of selected object Use gesture to tune the parameter and update the object Implementation Steps Detect hand gesture as tuning gesture (in our current example, we are using thumb-up gesture, it can be customized, and the o...
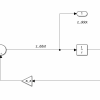
Weekly Update - As part of the FORAY team, I worked on building a mathematical model of the blimp on Simulink. I familiarized myself with dynamic equations of the motion of the blimp. Modeling - Tutorial I used to learn the fundamentals of Simulink – http://ctms.engin.umich.edu/CTMS/index.php?e...
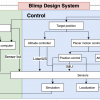
This summer I am working with other members of LEMUR on the FORAY project where we are developing a fleet of LTAVs (lighter-than-air vehicles) with a design emphasis on speed and agility that can compete in a game of aerial soccer or Quidditch. Below is the overal structure of the different aspect...

Objective: Detect hand gesture as rescaling gesture (need both hands) The scale of selected object changes along with the distance between two palms Implementation Steps Detect hand gesture as rescaling gesture (in our example, defined as palm-to-palm gesture, which can be customized and th...
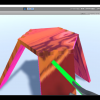
Objective: When the hand is selecting gesture, cast a ray If the ray hits an object, highlight the object to represent "it is selected" When the hand is confirm gesture, destroy the ray, de-highlight the selected object Usage: only after an object is selected can it be modified Implementa...

I finished the way point smoother optimization algorithm to replace B-spline curve algorithm to make sure the final smoother path will not collide with obstacles. The failure cases: After way point smoother optimization: Other cases using way point smoother optimization:
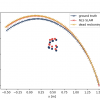
I wrote a 2D SLAM simulation on Python as a starting point. I implemented the nonlinear least squares (NLS) SLAM. To be specific, it is just to solve: \((\hat{s}_{1:n}, \hat{\lambda}) = {arg\,min}_{({s}_{1:n}, {\lambda})}\, \sum_{t=0}^{n-1} \| s_{t+1} - f(s_t, u_t) \|^2_{Q} + \sum_{t=1}^n \| o_t -...
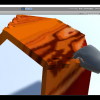
This week, I did quite a lot of literature review and a lot of math to convert the complicated model to a simple but really applicable version. The model can convert the corrugated sturcture to simple plates by redefining the equivalent material properties (Young's modulus mostly). Using this model,...
For the past week, I focued on the revision for the Robotica paper, titled 'Robotica_Towards One-Dollar Robots: An Integrated Design and Fabrication Strategy for Electromechanical Systems.' It is pretty tricky to address some of the comments. I almost finish the first round revision. The due date i...
Objective: Grab an object when the hand is grabbing and near the object Change object's position and rotation according to hand's position and rotation Release the object when the hand is not grabbing Easy solution (also the method in the previous version of the project): When hand gestu...