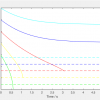
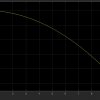
The graphs seem to suggest that the smaller the initial rise of the bistable beam, the longer the SCP actuator, and the more influence temperature change has on the force generated by the actuator, the easier for the bistable beam to snap through. The trends align with our expectations even though t...
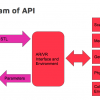
Earlier this week, I successfully implemented basic transformations of simple Unity Game Objects such as a cube through ARCore and Gesture Detection. However, as one of our primary goals is to extract the data and update the parameters back to the compiler that Wenzhong has developed, I began to do...
The Matlab model can now build successfully, and with zero thrust, the flyer will free fall. The scopes are added to print out the position in the initial frame, thrust, and rotation of the body frame relative to the global frame. The unit delay modules are added so a the flyer module could pass its...
Earlier this week, I was fortunate enough to discuss and share my learning across several meetings with teammates in my lab, my supervisors, and also fellow researchers who were also immersed in their individual studies. Initially, my main goal and motivation for pursuing this research project in fu...

This week, we started writing instructions for the two wheeled robot. While the level of difficulty to build this robot is not substantial, we found it may be a bit much for middle school students to build as their first paper folded robot. Because of this, we decided to start off with something muc...

Creation of robots is quite a time-intensive and challenging task. Using LEMUR's RoCo has now made the process much faster, simpler and cheaper. The goal of this project is to make use of this easy process to introduce robotics and teach basic Math and Science lessons to young middle school studen...

This week I worked on analyzing the strain of supercoiled polymer(SCP) actuator of a new nylon string. By using various weights and current during annealing process, I found that the strain during annealing process is about 10-15%. However, after annealing, the strain significantly reduces. In the n...
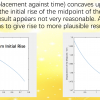
Below are the graphs describing the relationships between time and the displacement of the midpoint of the bistable beam, assuming a quasi-static state of the beam. More explanations are needed, and we need to vary some of the parameters to see how they affect the shape of the graph.

Last few days, we tried to use a 'new' thread to fabricate our SCP actuator. The most difficult part is that the mechanical propoties are so different from the previous thread though they have the same product number and came from the same retail. We ran a lot of tests to reset the coiling and annea...
Here is the video demo showing using data collected by ros packages(aruco-detect aruco-record) transfer to CoLo to perform localization using measurement data only(algo: EKF) Note: the groudtuth file and odometry file are unreliable aruco_colo_demo.mp4 aruco_colo_phy_demo(1).mp4