I fixed the project to the lemur GitLab folder and added a README file: https://git.uclalemur.com/dongwei95/Single-Motor-Flyer-Simulation The linearizaiton documentation has been updated into a two-column format: LInearization Comparision with Original.pdf

This week I adapted the visualization script for a quadcopter from https://github.com/gibiansky to my single-motor model. The animation helps to determine the tipping point where the drone starts to flip.The blue dot represents the propeller and the line on top represents the general thrust magnitud...
The control frame is changed such that in the control frame, the propeller lies on the xz plane. The resulting linearization matrices are: Now because the model often crashes with singularity points, it is necessary to convert the Simulink model to a MATLAB script for debugging purpose.
This week I compiled my debugging results into a document. There are 4 blocks that need debugging: the production control, position thrust, flyer (dynamics simulation), and the attitude control block. The main goal of the model is to verfiy the control strategy. Therefore, it is important to have th...
This week I have been debugging blocks other than the attitude controller. After finding a transformation from the body frame to the control frame, new matrices from linearization is generated. However, because the rotation matrix from the original paper is unknown, it is not possible to directly co...
This week I reevaluated the linearization script I wrote last quarter. I modifed the script so that it uses the simplified dynamics of the quadcopter model (ignoring the angular acceleration and the moment of inertial of the propeller) LInearization Simplified Plan.pdf

The following steps are used to update the dynamics of an aerial robot. Calculate the rotation matrix R from the last iteration's Euler Angle θ. Calculate angular acceleration given current force and torque inputs, and the angular velocity from last iteraion. Update angular velocity Calculat...
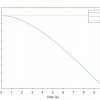
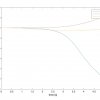
For the past two weeks I have been examining the dynamics model in MATLAB. I separated the linear and angular state variables. When setting the angular velocity of the body to zero and the initial pitch angle to 0.3454 rad, the flyer is able to maintain its position in both y and z directions, while...
Quarter Goals: Do more block tests with my model Use simscape to import CAD model and compare with results from mathematical model from the simulation. Work with Amir to set up autonomous quadcopters Study optimal control and see how it can apply to the single-motor flyer project Current Design of...