Last week, we reviewed the current state setup of the linearization script. Since the derivative of the total thrust cannot be calculated from the definition of the derivative, the total thrust should not be in the state. The error comes from misunderstanding of one of the equatoins of the original...
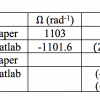
During the past week, I have been reexamining the linearization script I created for the attitude controller. The difference between results from my implementation and literature values might be attributed to 2 sources. The assumption that the propeller speed in the body frame relative to earth...
I have implemented linearization and LQR controller in the attitude control block. Previously, I tried to test the correctness of the dynamics block by trying to maintain hover after initializing the flyer at a hover posture. However, the flyer is only able to maintain the position for 06 seconds. B...

References: Zhang, W., Mueller, M. W., & Dandrea, R. (2016). A controllable flying vehicle with a single moving part. 2016 IEEE International Conference on Robotics and Automation (ICRA). doi:10.1109/icra.2016.7487499
The Matlab model can now build successfully, and with zero thrust, the flyer will free fall. The scopes are added to print out the position in the initial frame, thrust, and rotation of the body frame relative to the global frame. The unit delay modules are added so a the flyer module could pass its...
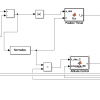
The control loop has been implemented in Simulink. The physics and attitude controller are yet to be finished.The total required thrust comes from two sources: the thrust from the position controller and the thrust required for the attitude controller. The following image shows the control loop in S...
The problem of the single-motor-flyer can be summarized and assumptions added.
The relation between the control coordinate frame and the body frame is still unclear. How the angular velocity of the body with respect to the inertial frame viewed by the control frame is extracted from IMU.
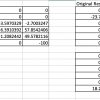
This week we have been debugging the Matlab script. We used the symbolic toolbox with a different solver and got the solution that “Relaxed hover solutions for multicopters: application to algorithmic redundancy and novel vehicles” gave. However, sometimes the script can generate 2 different solutio...
This week we have implemented the hover solution of a single-motor flyer in Matlab, given the mechanical properties: thrust and reaction torque coefficients, drag coefficient, the position of the propeller in the body frame, mass, moment of inertia of the body and the propeller, and the mass of the...