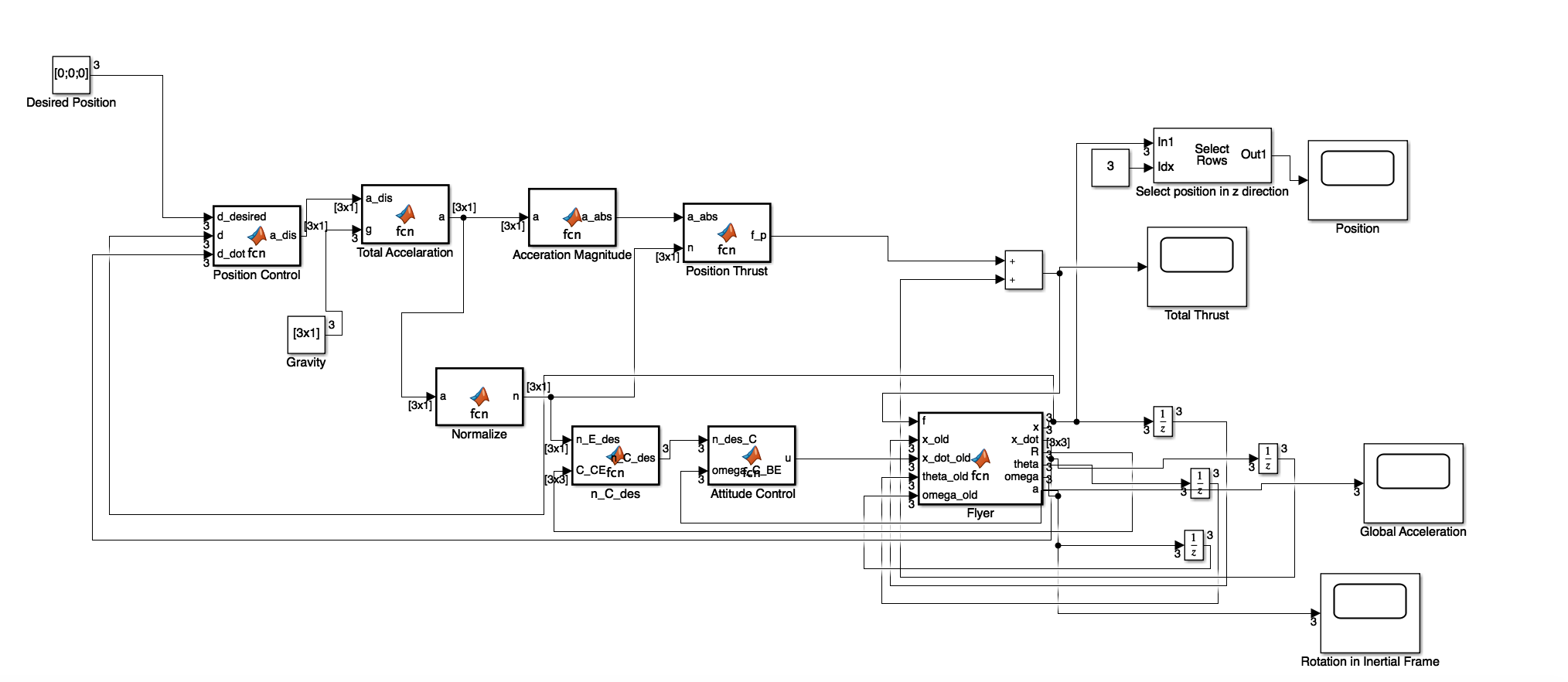
The Matlab model can now build successfully, and with zero thrust, the flyer will free fall. The scopes are added to print out the position in the initial frame, thrust, and rotation of the body frame relative to the global frame. The unit delay modules are added so a the flyer module could pass its position and rotation from the previous iteration to the current iteration.
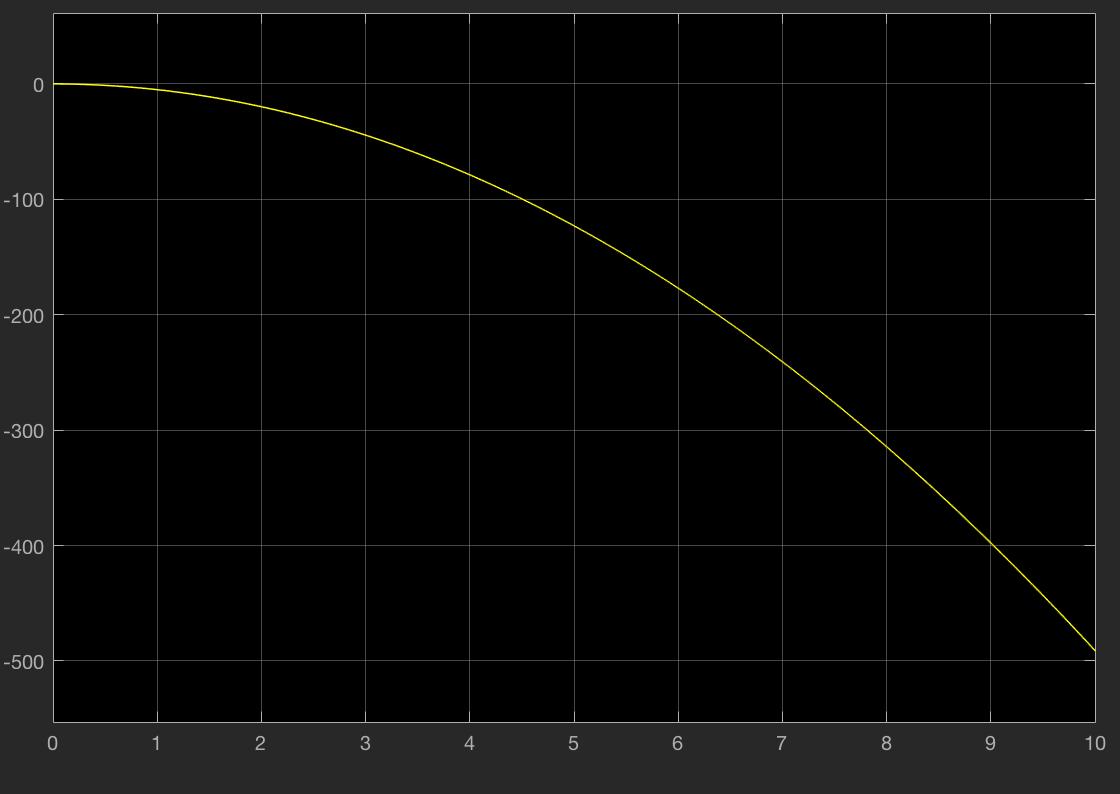 The model free falls for 10 seconds
The model free falls for 10 seconds
The Matlab model can now build successfully, and with zero thrust, the flyer will free fall. The scopes are added to print out the position in the initial frame, thrust, and rotation of the body frame relative to the global frame. The unit delay modules are added so a the flyer module could pass its position and rotation from the previous iteration to the current iteration.
The model free falls for 10 seconds