
This week I focused on fine tuning my RoCo component designs to fit with the electronics and assemble my first fully functional cut and fold robot. I wanted to make sure that my method for production would be feasible before I continued designing more components for robots with more functionalities....

This past week, I focused on designing more modular components to add to Roco as well as programming motors using the Arduino microcontroller to familiarize and simulate different types of motion. I was able to understand Roco much better through the process of designing these new components; specif...

See my research poster and presentation titled "Printable Robotic Boat Swarms with Actuation and Sensing Capabilities" for an overview of my contributions from Summer 2021.

I have begun testing different designs for mounting servos and DC motors in any orientation and at any position on each of the boat hull morphologies, as shown in these photos: servoMountDesigns.pdf. I'm testing them by hand first (using tape and scissors), before sending them off to Jill for her...

I have built the first prototype of a boat with rudder steering. This video shows the rudder steering in action. We ran the boat four times and obtained these results: When the rudder is straight, the boat goes (relatively) straight. When the rudder is tilted to the left, the boat veers to...
After completing the boat's electrical base, I began testing different paper chassis designs for driven propellers and paddlewheels. I used the dashboard joystick to control the motors wirelessly while noting each boat's performance. The paddlewheels use servos driven by the Adafruit Servo FeatherWi...
I set up the Adafruit Huzzah32 Feather Board with the FS90R continuous rotation servos (powered by an external power bank), the Adafruit NeoPixel FeatherWing, and the Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout. In addition, I got the Roco library working locally on my computer and wil...
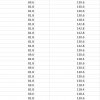
I have added time remaining functionality to the power consumption board that I have. However, it is not refined and therefore has a few caveats for use. The program assumes that the battery is at full charge upon program start. While there is no current through the sensor, the time remaining wi...
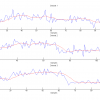
In order to improve the inertial measurement capabilities of the blimps on the Foray project, I have been working with Zhaoliang to implement various filtering algorithms for the altimeter data we collect. So far, I have used Matlab to create both an exponential filter and a moving average filter....
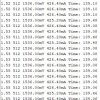
I have been working on testing power consumption. Below are the results for the brushless and brushed dc motors we currently have. This means that with a 1000 mAh battery, we can run one of these motors for about seven hours. This result is quite good, but I need to extend the test for longer an...