The goal of LEMUR is to enable a future filled with robots, with research areas spanning:
- Printable robotics
- Rapid design and fabrication
- Controls algorithms
- Wireless sensor networks
Click here for more information on joining the lab.
Current projects in LEMUR include:
Past projects:
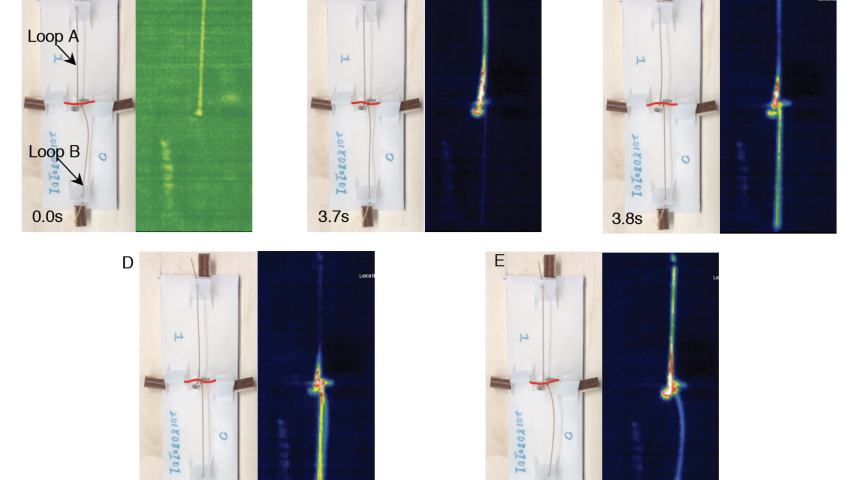
- Automation of SCP Actuator Production
- Autonomous Quadcopter Swarm using external localization
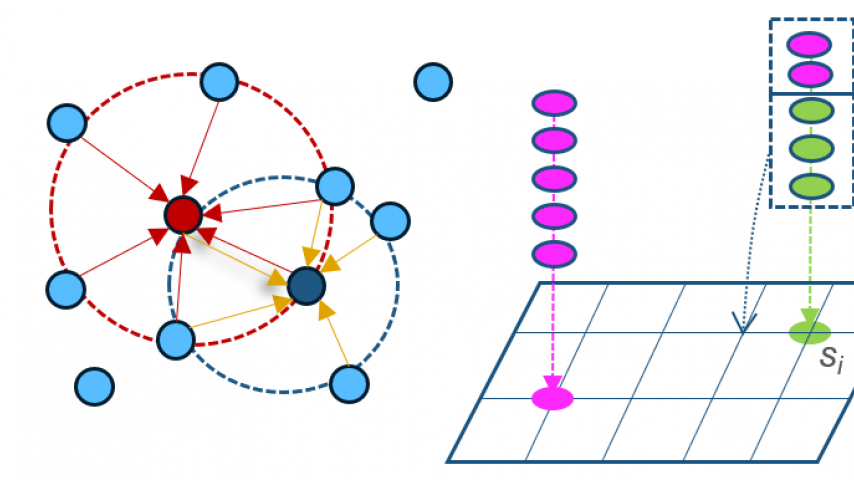
- CoLo: A Performance Evaluation System for Multi-robot Cooperative Localization Algorithms
- Computational Design of Planar 3D Structures
- Design For Everyone
- Distributed estimation and robotic localization
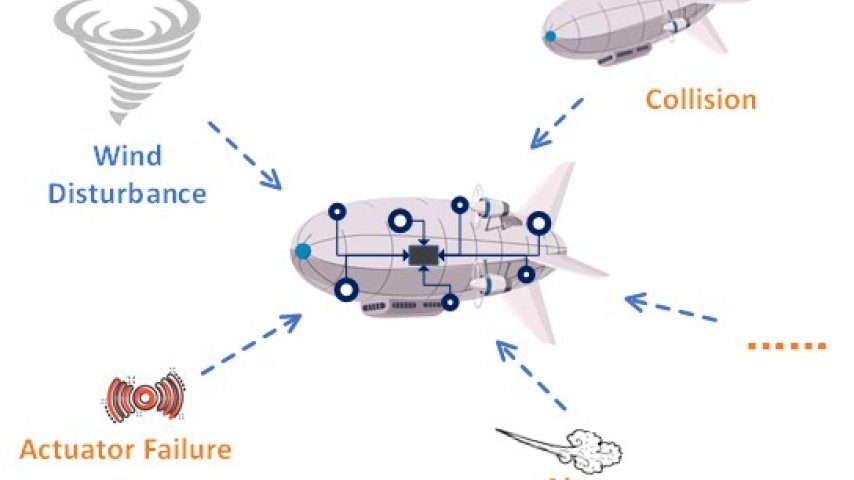
- FORAY: the Autonomous Agile Airship Armada
- High Throughput Path Planning
- Optimization of Robot Control and Structure
- Path Planning Algorithm for UAVs Control
- Risk-Aware Motion Planning
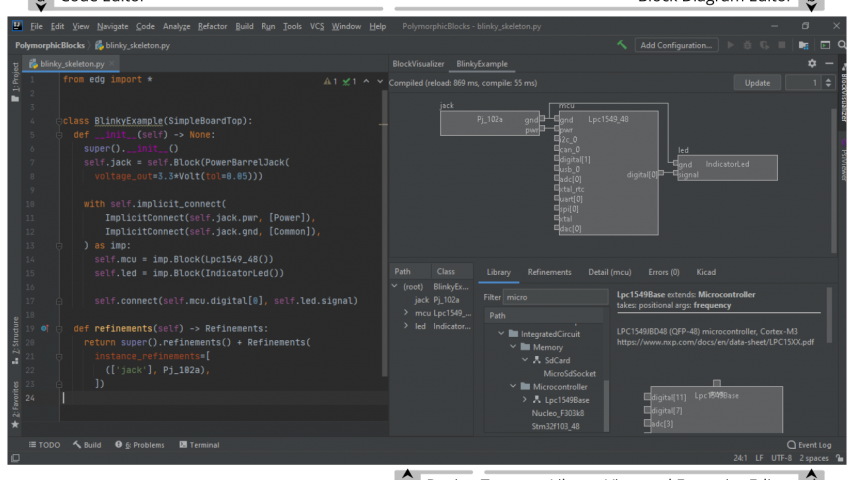
- Robot Compiler
- Semi-autonomous driving
- Simulation and Controller Generation for Foldable Robots
- Single chip Synthesizable All-digital Radio
- Single-motor flying robot swarm
- SLAM for all Autonomous Agents
- Super-Coiled Polymer (SCP) Actuators
- TFO-SR: Traffic Flow Optimization with Scaled Robotics