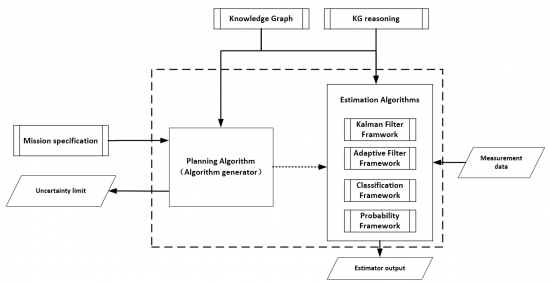
Sensing Planning Framework
Ubiquitous Sensing Planning Framework
Heterogeneous AI enables agents to dynamically and intelligently team up to respond to new and unexpected missions.
Project Member: Zhaoliang Zheng , Zida Wu
Paper publication:
- Wu, Z., Zheng, Z., & Mehta, A. (2021) "Joint State and Input Estimation of Agent Based on Recursive Kalman Filter Given Prior Knowledge ", in 2022 IEEE International Conference on Robotics and Automation (ICRA).
- Antoni Viros i Martin,Kewei Cheng, Zhaoliang Zheng, Amy Fang,Hadas Kress-Gazit, Ankur Mehta, Yizhou Sun, Daniel Selva,"Decentralized Context-Based On-Board Planning for Earth Observation Missions", AIAA SciTech Forum 2020
Project Storyboard:
Phase 1 Sensing the outside world and the information in the environment are always the field that peopleinterested in most. Since the beginning of human civilization, man has been inventing and developing allkinds of tools to perceive the world we lived in. For example, compass to tell direction, telescope to watchthe movement of celestial bodies, etc.
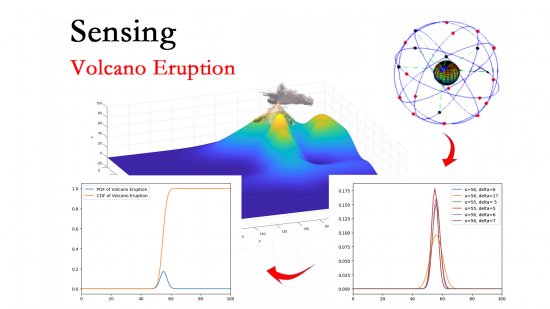
As mankind enter the information age, cutting edge technology and advanced tools have grown exponentially. We humans have developed so many sophisticated and powerful sensors, from satellites in the skyto nanoprobes. These devices are so powerful and they compose a much more general resource that canbe leveraged for new missions. For instance, temperature sensors can be used not only to monitor dailyair temperatures, but also to reconfigure to a mission of monitoring volcanic eruptions, or to reconfigure tomonitor rocket launches. To have a better intuition of this project, here is another example: the CCTV camera can be used not only to monitor traffic conditions, but also to track a causing-trouble vehicle inthe city. And CCTV cameras cooperate webcam of autonamous cars(IoT) in the future to reach a betterperformance of tracking a criminal car.
Based on these natural thoughts and existing powerful sensors, we can ask questions like: how do wesense the world in a smart way? How do we get the optimal estimated value by smartly choosing differentalgorithms or solutions? If an agent is capable of participating, what is the algorithm that computes themission objective from agent hardware, and what is the resulting utility? How good is the outcome ofparticipating sensors?
Phase 2
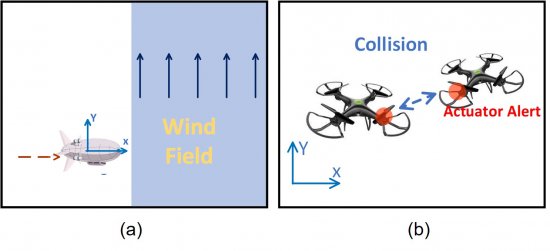
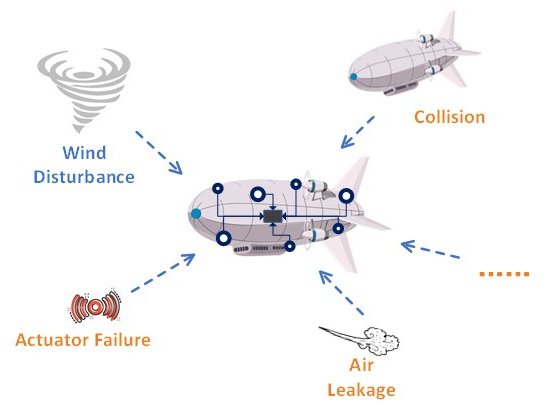
Modern autonomous systems are purposed for many challenging scenarios, where agents will face unexpected events and complicated tasks. The presence of disturbance noise with control command and unknown inputs can negatively impact robot performance. Previous research of joint input and state estimation separately studied the continuous and discrete cases without any prior information. This paper combines the continuous and discrete input cases into a unified theory based on the Expectation-Maximum (EM) algorithm. By introducing prior knowledge of events as the constraint, inequality optimization problems are formulated to determine a gain matrix or dynamic weights to realize an optimal input estimation with lower variance and more accurate decision-making. Finally, statistical results from experiments show that our algorithm owns 81\% improvement of the variance than KF and 47\% improvement than RKF in continuous space; a remarkable improvement of right decision-making probability of our input estimator in discrete space, identification ability is also analyzed by experiments.