Risk-Aware Motion Planning
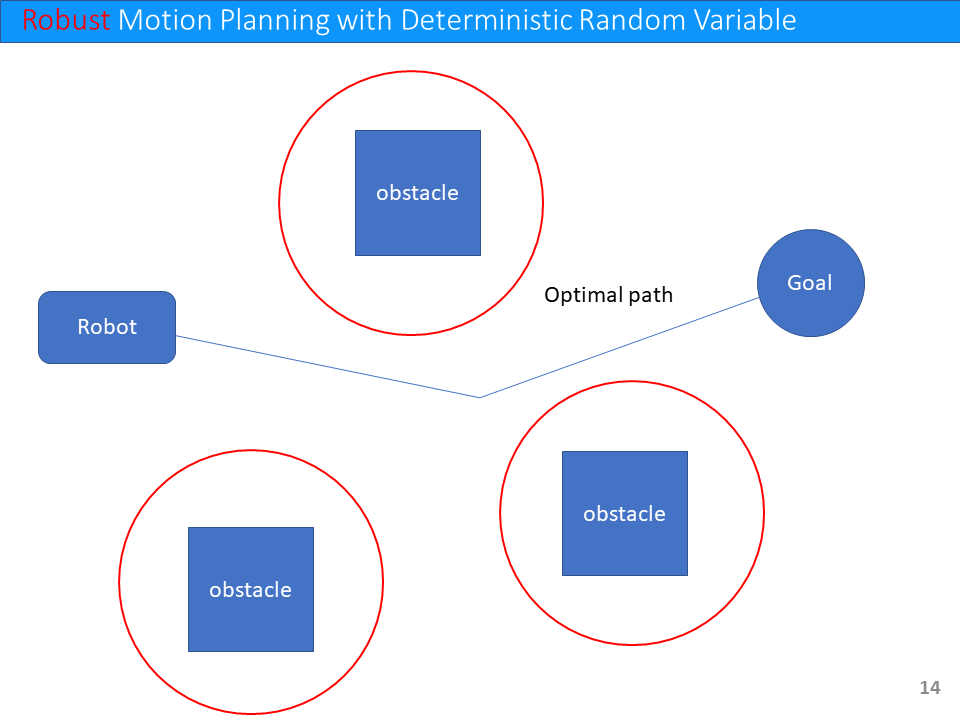
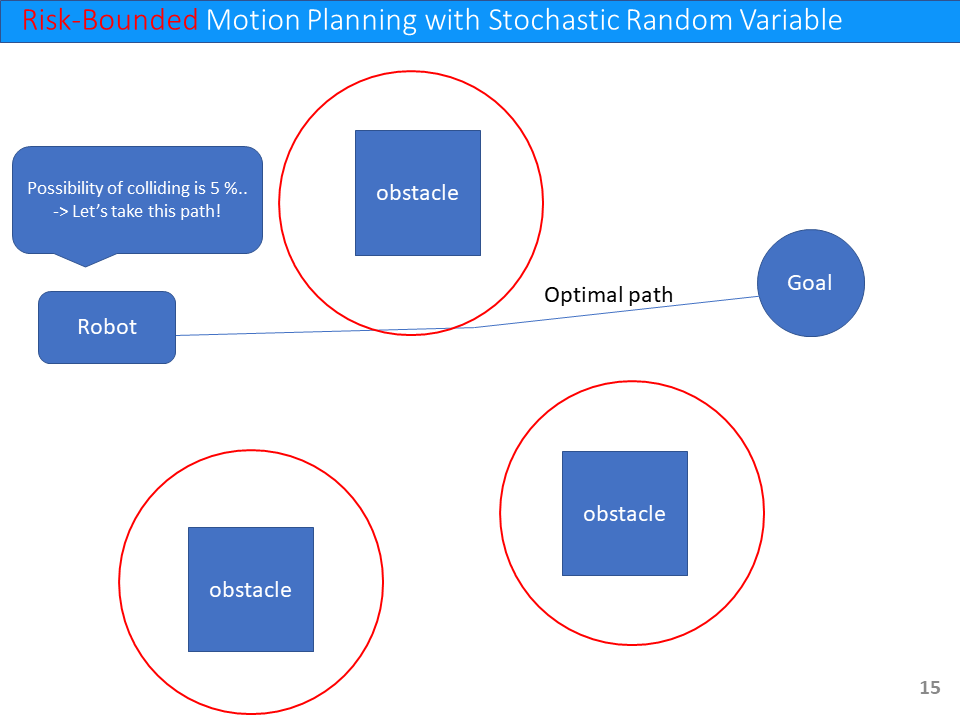
To realize autonomous challenging operation in uncertain environments, motion planning with guaranteed bounded risk is essential. In particular, planning complex motions for limbed robots in presence of uncertainties in consideration of risk bound is challenging because planners need to design footsteps and a body trajectories while considering the robot kinematics and reaction forces given risk bounds.
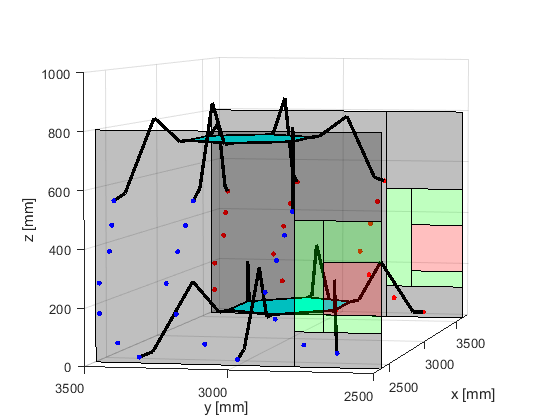
In our work, we address a motion planning algorithm formulated as NLP for a limbed robot equipped with stochastic gripping forces. Our proposed planner solves for stable postures and forces simultaneously with guaranteed bounded risk. In addition, chance constraints are introduced into the planner that restrict contact forces in a probabilistic manner. We employ a Gaussian Process (GP), a non-parametric Bayesian regression tool, to acquire the PDF of the gripping force in a data-driven manner. Our proposed motion planning algorithm is validated on an 11.5 kg hexapod robot with spine grippers for multi-surface climbing. While we focus on multi-surface robotic climbing with spine grippers in this paper, our proposed planner can be applied to other robots with any type of grippers for performing any task (e.g., planning of walking, grasping) as long as the robot has contact points with stochastic models. (Joint work with RoMeLa at UCLA)
Project Member: Yuki Shirai