Autonomous Quadcopter Swarm using external localization
An infrastructure for flying multiple UAV's via external positioning
Project Members: Amir Omidfar
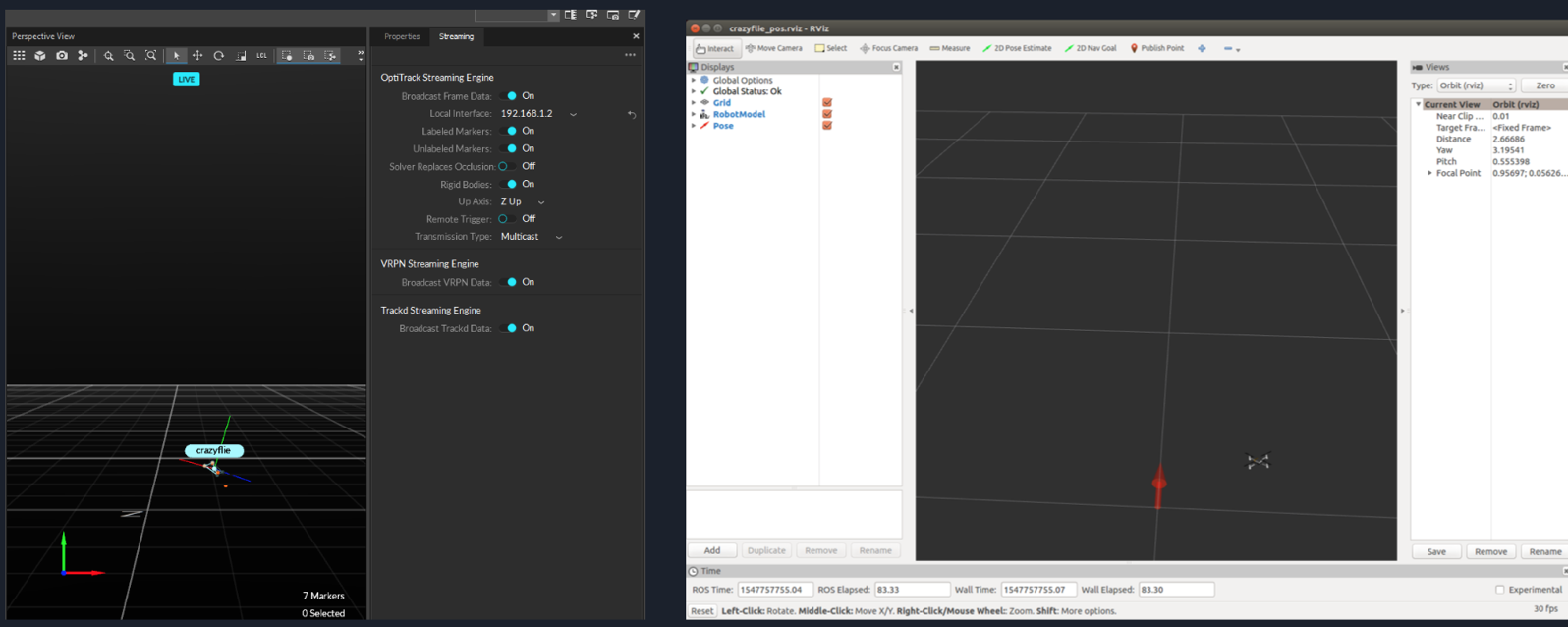
From the benefit of having a swarm of quadcopters helping rescue teams to implement new methods of localizations, drones have become involved in various research areas. In this project, we would like to employ external localization to control and fly quadcopters autonomously; designing an infrastructure that is useful for some of our research interests. For external localization, we are using Optitrack motion capture system, the quadcopter used is Crazyflie, and, finally, ROS(Robotic Operation System) interface is utilized to control and command Crazyflie.
Here is a demonstartion of hovering single crazyflie (demo) and we are currently working to further expand the system to fly multiple UAV's.