CoLo: A Performance Evaluation System for Multi-robot Cooperative Localization Algorithms
Open source toolchain to characterize two-dimensional cooperative localization algorithms
Project Lead: Shengkang Chen Project Members: Ben Limpanukorn, Sagar Doshi, Joseph Miller
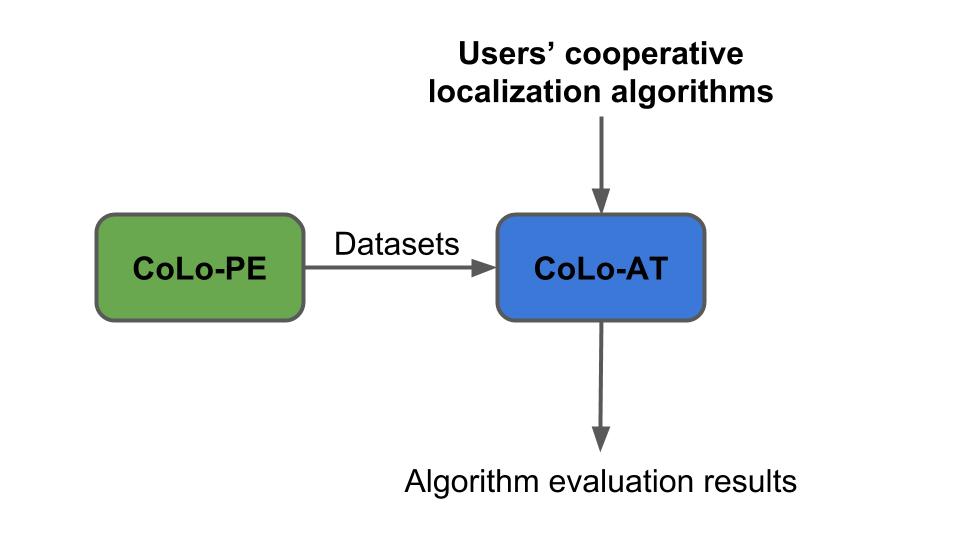
This paper describes CoLo - a performance evaluation system for two-dimensional cooperative localization algorithms. The system consists of a physical experiment (CoLo-PE) for data collection and a software analysis tool (CoLo-AT) using real-world datasets to evaluate the performances of users' cooperative localization algorithms. CoLo allows researchers to conveniently add their cooperative localization algorithms and test them extensively on different real-world datasets with various settings.
(Accepted) S. Chen, and A. Mehta, "CoLo: A Performance Evaluation System for Multi-robot Cooperative Localization Algorithms” in 2019 International Conference on Robotics and Automation (ICRA), May. 2019.
Features
- Easy to setup and run
- Test with real world dataset
- Flexible control on the real world dataset
- Easy to add and modify algorithms
- Preloaded with several existing algorithms
- Modularized simulation environment for CoLo-AT
Past Project Members: Clara Chun | Kyle Wong | Cade Mallett