Single-motor flying robot swarm
This project aims to design and build a small, printable, controllable single-motor flying robot.
Project Members: Wei Dong
A single motor flyer is an engineering experiment that trades algorithmic simplicity for structural simplicty. If a single-motor drone could be built successfully, the potentially reduced cost and design complexity could bring down the cost of drone swarms. Individual drones will also be able perform tasks such as reconnaissance and internet connection.
The current stage of the project involves designing and testing a simulator in MATLAB, so that given a set of physical properties, the simulator could simulate the trajactory of the drone and control it to fly to the desired location. The simulator design is broken into 2 parts: controller and dynamics
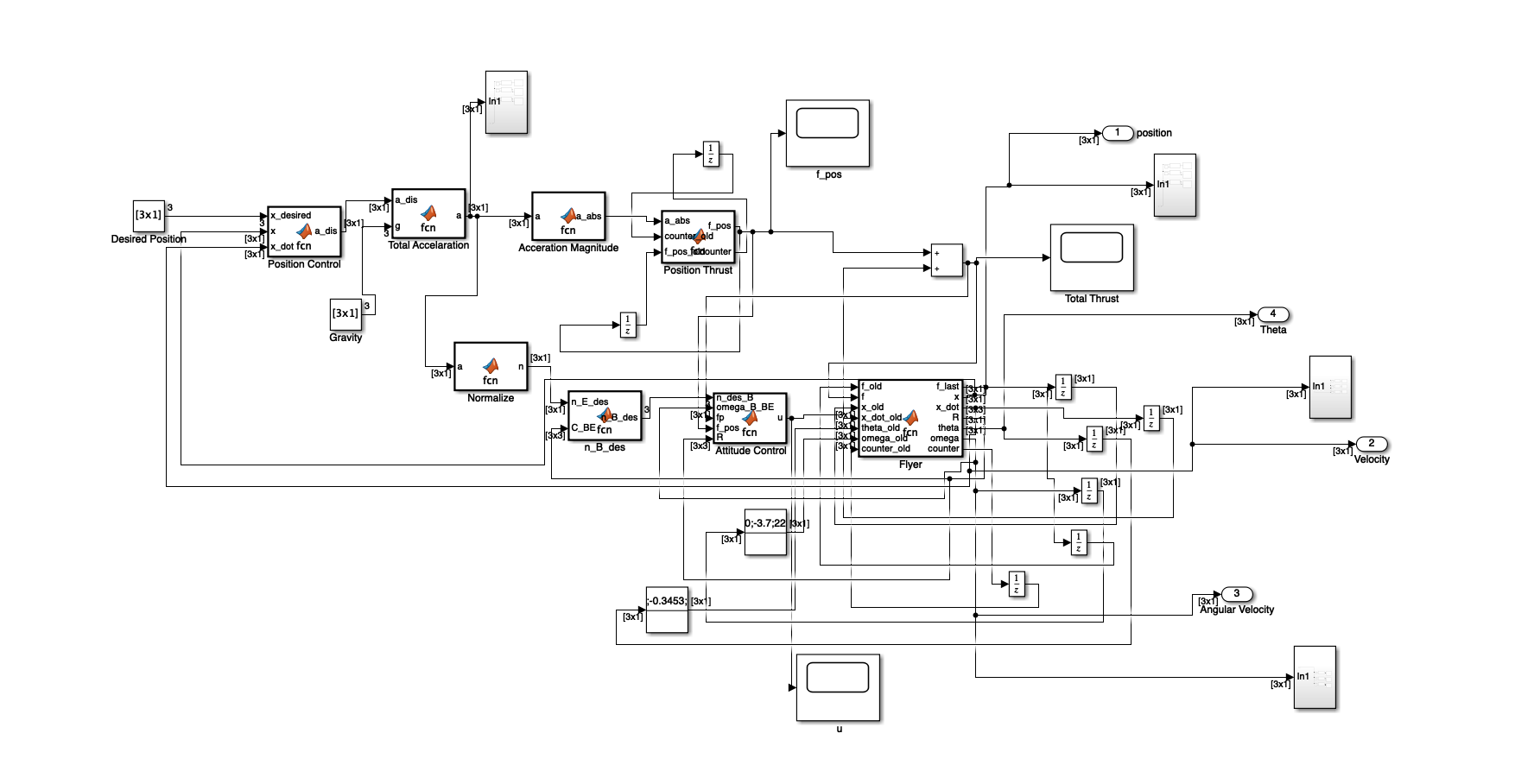 The current design of the controll loop.
The current design of the controll loop.
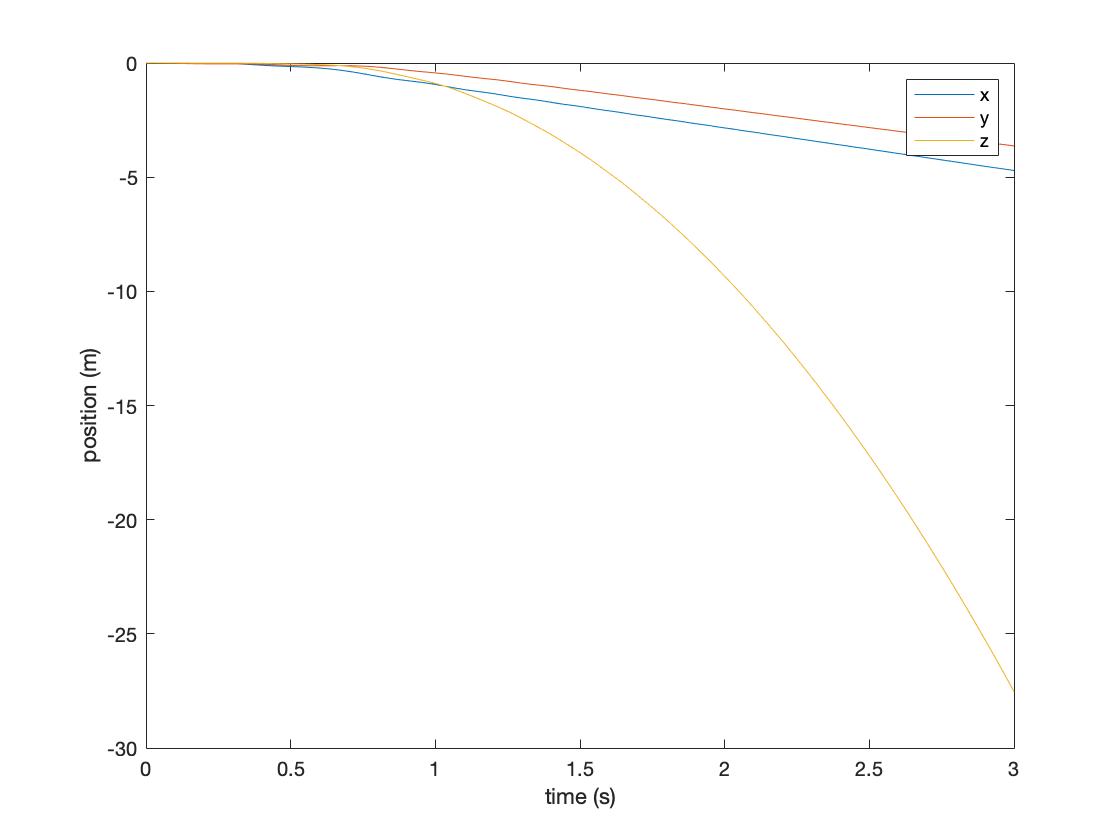 Position of a single motor flyer (starting from the hover state, without controller)
Position of a single motor flyer (starting from the hover state, without controller)