Computational Design of Planar 3D Structures
In this project, we develop design tools that can rapidly evaluate and design planar 3d structures.
Project High Level View
Part 1: Computational Design and Fabrication of Corrugated Mechanisms from Behavioral Specifications
Orthogonally assembled double-layered corru- gated (OADLC) mechanisms are a class of foldable structures that harness origami-inspired methods to enhance the structural stiffness of resulting devices; these mechanisms have extensive applications due to their lightweight, compact nature as well as their high strength-to-weight ratio. However, the design of these mechanisms remains challenging. Here, we propose an efficient method to rapidly design OADLC mechanisms from desired behavioral specifications, i.e. in-plane stiffness and out-of-plane stiffness. Based on an equivalent plate model, we develop and validate analytical formulas for the behavioral specifications of OADLC mechanisms; the analytical formulas can be described as expressions of design parameters. On the basis of the analytical expressions, we formulate the design of OADLC mechanisms from behavioral specifications into an optimization problem that minimizes the weight with given design constraints. The 2D folding patterns of the optimized OADLC mechanisms can be generated automatically and directly delivered for fabrication. Our rapid design method is demonstrated by developing stiffness-enhanced mechanisms with a desired out-of-plane stiffness for a foldable gripper that enables a blimp to perch steadily under air disturbance and weight limit.
To summarize, the contributions of this work include:
- computationally tractable analytical models that characterize the stiffnesses (both in-plane stiffness and out-of- plane stiffness) of OADLC mechanisms,
- experimental validation of the analytical stiffness models of OADLC mechanisms,
- an optimization-based method to computationally design OADLC mechanisms with desired behavioral spec- ifications while minimizing the weight of designs,
- a programming package that can automatically generate ready-to-cut patterns of the optimized design from the specifications, and
- demonstration of the proposed design paradigm via a robotic gripper on a blimp vehicle.
Demo:
Origami grippers on a blimp. (a) Original gripper, 25.2 g. (b) Gripper with optimized stiffness enhancement, 30.7 g. (c) Gripper with naive stiffness enhancement, 37.7 g. (d) A blimp with the original gripper attached.
Perching of a blimp using an origami gripper. (a) Blimp can stay on the bar using the original gripper when there is no air disturbance. (b) Blimp detaches the perching bar when air flow increases to 40 cfm. (c) Blimp rests on the bar. (d) Blimp stays on the bar even with 40 cfm air blowing.
Demo video link: view video
Paper link: view paper
Project GitLab Repo: view project repo
Part 2: A Computational Design and Evaluation Tool for 3D Structures with Planar Surfaces
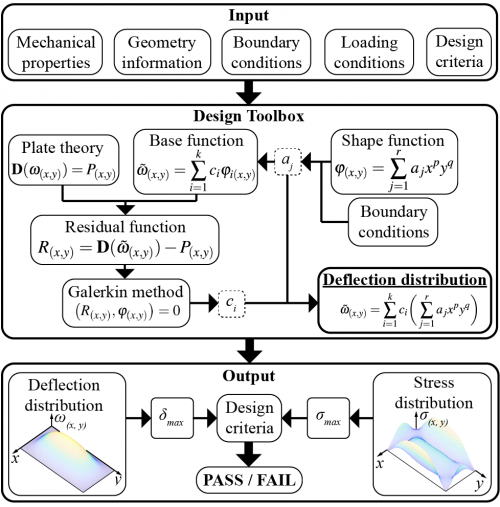
Three dimensional (3D) structures composed of planar surfaces can be build out of accessible materials using easier fabrication technique with shorter fabrication time. To better design 3D structures with planar surfaces, realistic models are required to understand and evaluate mechanical behaviors. Existing design tools are either effort-consuming (e.g. finite element analysis) or bounded by assumptions (e.g. numerical solutions). In this project, We have built a computational design tool that is (1) capable of rapidly and inexpensively evaluating planar surfaces in 3D structures, with sufficient computational efficiency and accuracy; (2) applicable to complex boundary conditions and loading conditions, both isotropic materials and orthotropic materials; and (3) suitable for rapid accommodation when design parameters need to be adjusted. We demonstrate the efficiency and necessity of this design tool by evaluating a glass table as well as a wood bookcase, and iteratively designing an origami gripper to satisfy performance requirements. This design tool gives non-expert users as well as engineers a simple and effective modus operandi in structural design.
The contributions of this work include the followings:
- a computationally rapid and inexpensive evaluation of 3D structures with planar surfaces;
- a tool capable of rapidly predicting structural failure and evaluating potential solutions for iterative design;
- demonstrations of our design tool’s capabilities and feasibility: enabling structural rapid failure prediction, rapid redesign; easy to adjust design parameters (e.g. geometry information, boundary conditions and loading conditions); and applicable to both isotropic materials and anisotropic materials.
Design toolbox:
Demo:
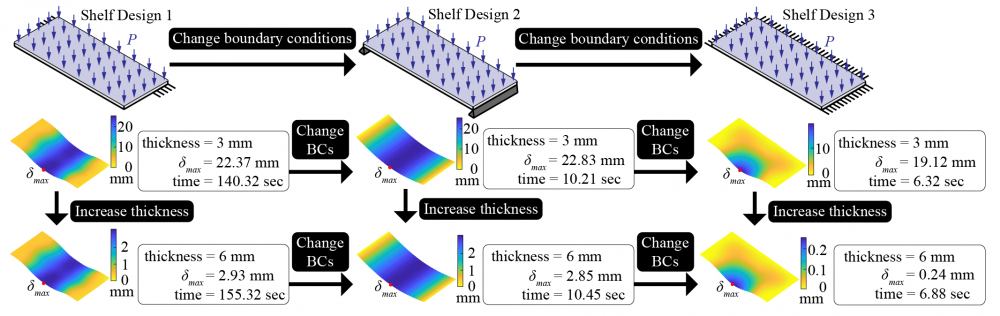
- Computational design of a bookcase. Boundary conditions and loading conditions are presented as schematic drawings. Analysis results (i.e. deflections) from our design tool are presented with corresponding thicknesses, maximum deflections and calculation time. Maximum deflection point marked in red dots.
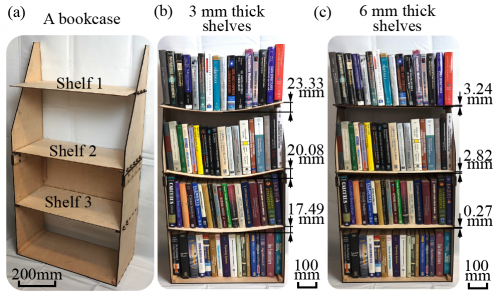
A physical book case demonstration. (a) A physical bookcase with three shelves. (b) Loaded bookcase with 3mm thick shelves. (c) Loaded bookcase with 6mm thick shelves.
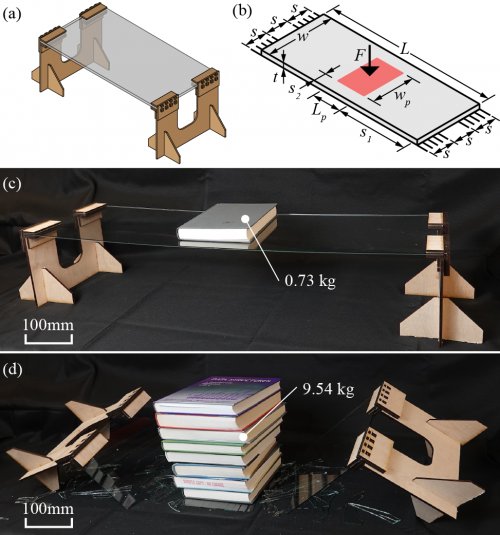
- Computational design of a glass top table. (a) Table design. (b) A schematic diagram for the glass top plate with boundary conditions and loading condition. (c) A \(0.73 kg\) weight at the center with no damage on the table. (d) A \(9.54 kg\) weight caused the glass to break. Parameters: \(L = 900 mm\), \(w = 300 mm\), \(t = 2.3 mm\), \(L_p = 160 mm\), \(w_p = 240 mm\), \(s_1 = 370 mm\), \(s_2 = 30 mm\) and \(s = 100 mm\).
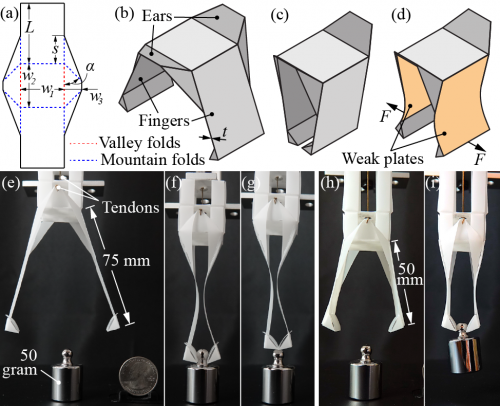
- Oriceps origami gripper. (a) Oriceps foldable pattern. (b) An open gripper. (c) A closed with No external force. (d) A deformed gripper under load. (e-g) Initial gripper failing to operate. (e) A gripper with \(75 mm\) long fingers. (f) It tries to grasp a \(50 g\) calibration weight. (g) It fails to lift the weight. (h-i) An improved gripper succeeding in operation. (h) A gripper with \(50 mm\) long fingers. (i) It lifts the weight.
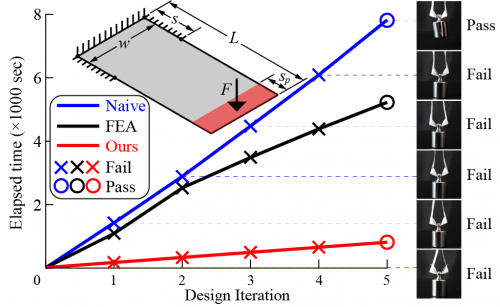
Elapsed time comparison for the same design iteration but different approaches.
Demo video link: view video
Paper link: view paper
Project GitLab Repo: view project repo