High Throughput Path Planning
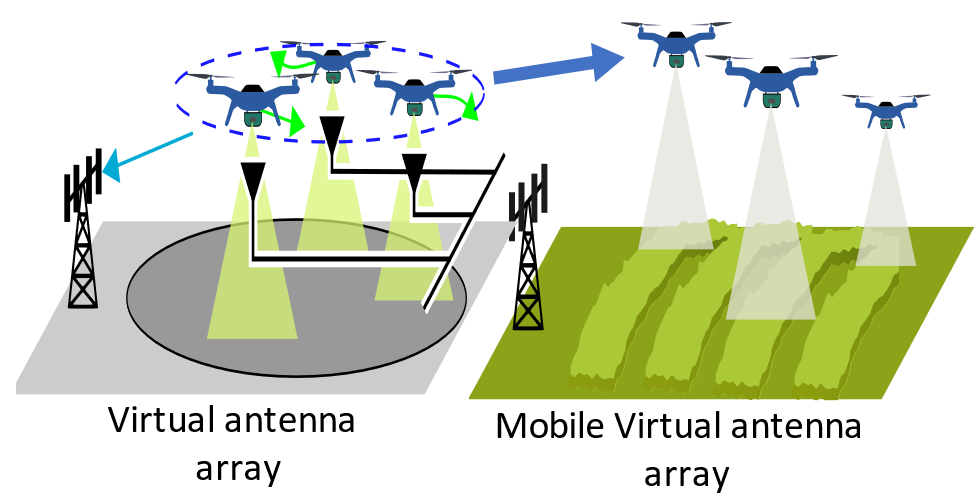
Path planning under MIMO spatial multiplexing network constraints for throughput enhancement in multi-robot data aggregation tasks.
Path planning under MIMO spatial multiplexing network constraints for throughput enhancement in multi-robot data aggregation tasks.