Path Planning Algorithm for UAVs Control
Point Cloud-Based Target-Oriented Path Planning Algorithm for UAVs Contorl
This research explores target-oriented path planning algorithm for controlling unmanned aerial vehicles (UAVs) in 3D point cloud environments.
Project Member: Zhaoliang
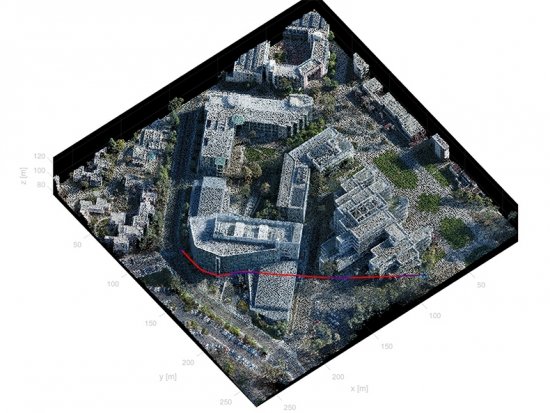
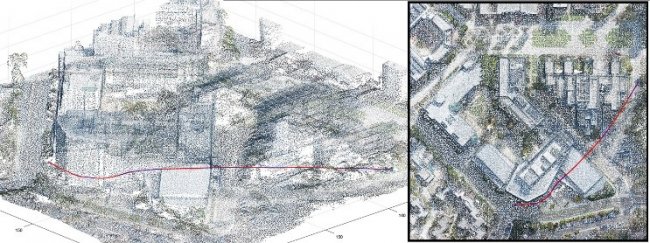
Fig.1: The blue trajectory is generated by our path planning algorithm and the red trajectory is the real UAVs trajectory after implementing the way-point based close-loop quadrotor control.