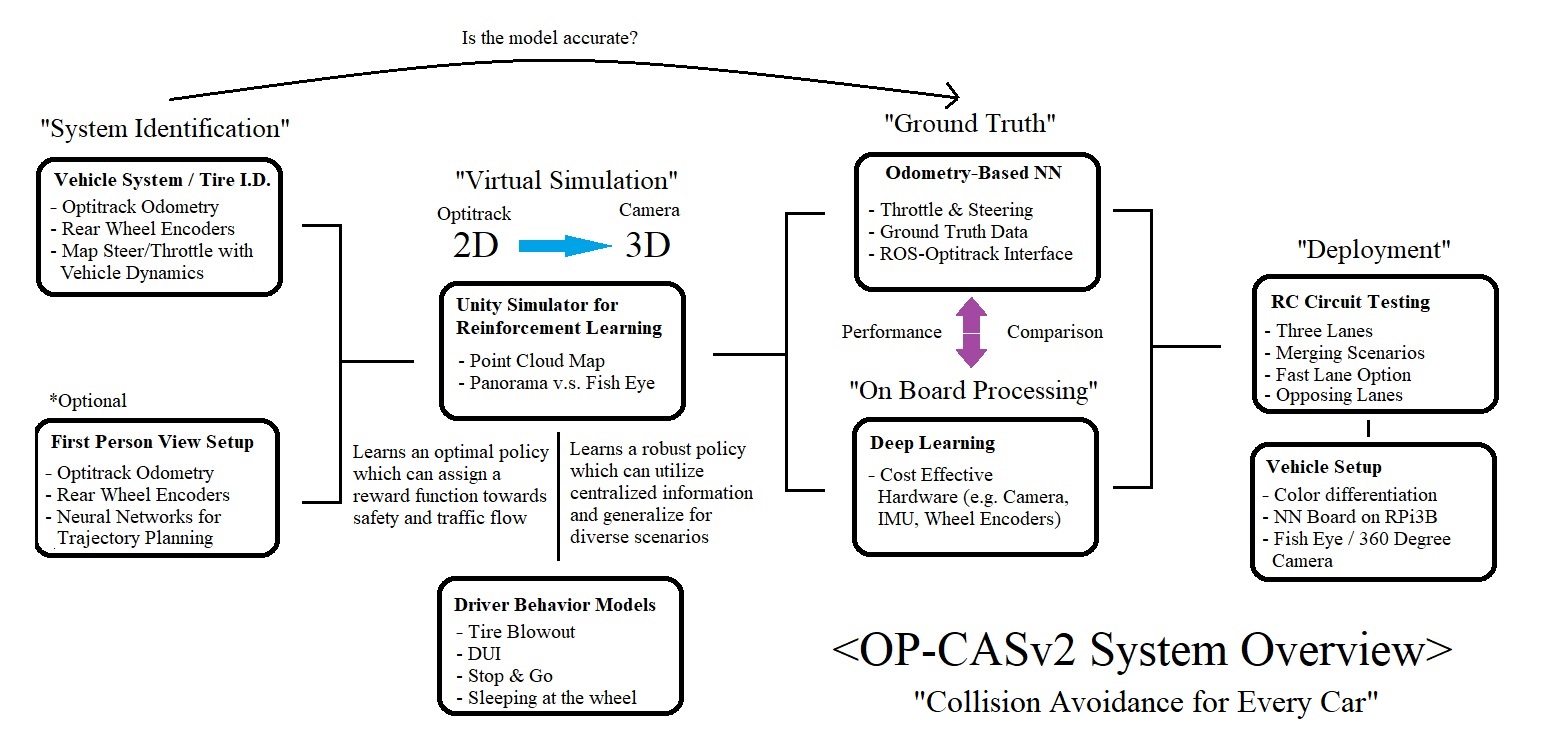
TFO-SR System Overview Diagram
This project will utilize four 1/28th scale RC vehicles as a research platform for traffic flow optimization techniques through a Unity simulator. The optimization will be done with deep reinforcement learning (DeepRL) on a RC circuit. We propose "TFO-SR: Traffic Flow Optimization with Scaled Robotics": an architecture based on overtaking procedures that optimizes traffic flow only using a single 360 degree camera with the following contributions:
Robust: The system is robust because it uses RL to create a policy which accounts for diverse driver behaviors affecting its environment.
Optimal: The system is inherently modeled to optimize against two parameters; safety and time-to-destination
Efficient: The system is efficient because it does not need localization for deployment and is not rule-based for each scenario.
Affordable: The system is cost effective because it requires minimal sensor hardware during deployment.
Extendable: The system is extendable because this system architecture can directly be applied towards autonomous motorsport applications.
Overall, this project will contribute towards the big picture problem of traffic flow optimization by tackling the subset problem of optimizing highway overtaking maneuvers through collision avoidance.
Project Members: Jesse Cha Cavan Stewart Kevin Lee Heesang Shin
{kind=link}