Automation of SCP Actuator Production
Automation of SCP Actuator Production
The production of SCP actuators currently requires constant human supervision to determine whether it has reached the optimal mechanical and physical characteristics. This is both an inefficient and inaccurate process. Techniques such as computer vision could help provide an effective automated production system.
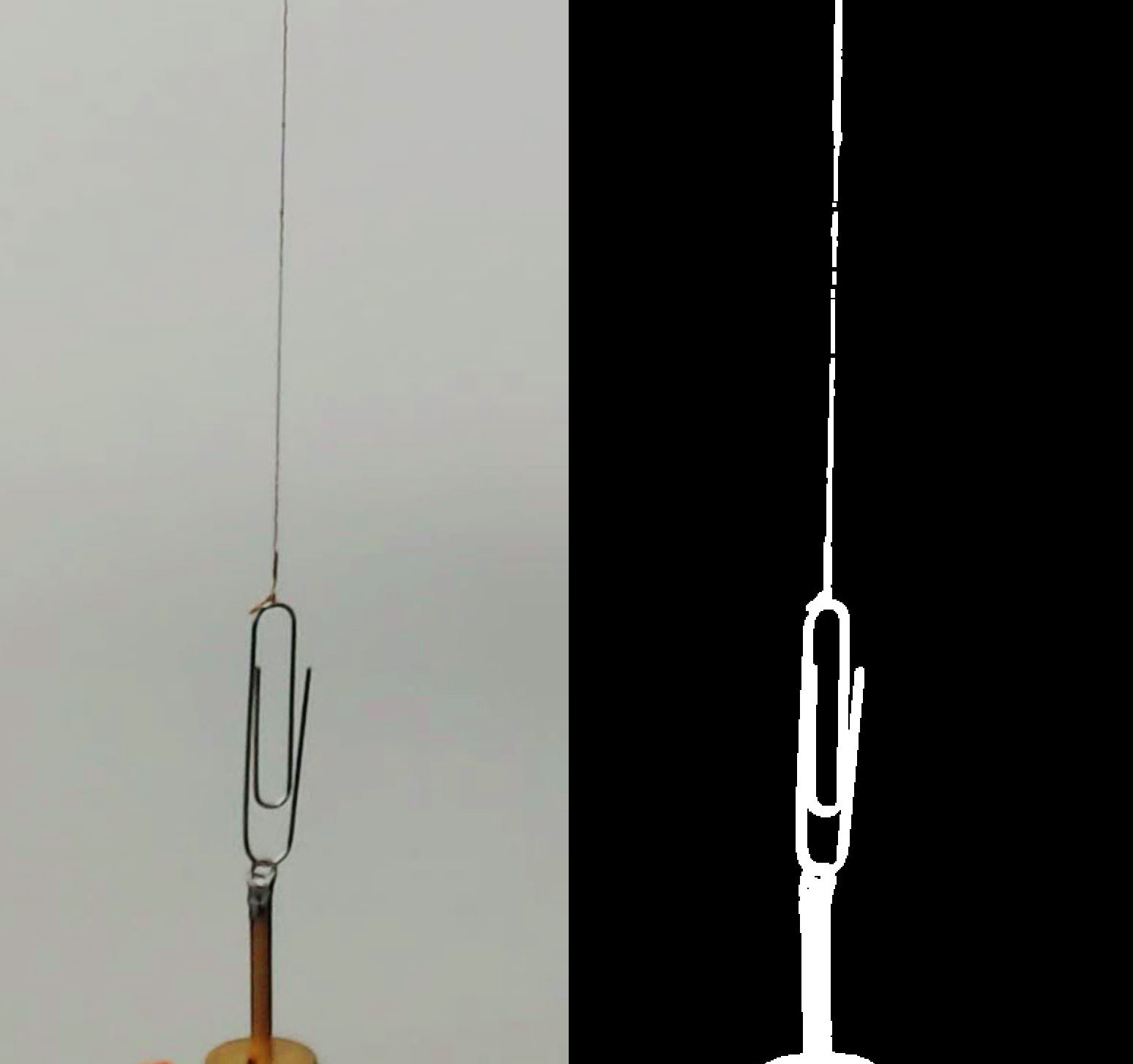
SCP (Super-Coiled Polymer) actuators is an area of research of the lab that could help make the prototyping and manufacturing of robots faster and less expensive. To create an actuator there are two main steps. The conductive thread used to create the actuator is first coiled onto itself, and then electrical current is periodically applied to heat the coil and release the internal stress. These two steps can be time consuming, especially if human supervision is required. Before the beginning of this project, a user would have to be present at all stages of the production, which could last up to 20 minutes. The goal of the project is to automate the production process, while also allowing the user to input specifications to optimize the process for different requirements.
Project Members: Jack He