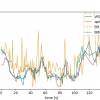
We are now able to demonstrate that the performances of EM-based SLAM algorithms are comparable to that of optimization-based. However, it is not easy to observe that same thing in the real-world dataset. simulation result The first challenge is whether to use IMU data or to only use the output...

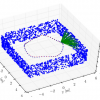
The below figure shows a ground truth body trajectory (gt, black) and ground truth landmarks (lmk, blue). The goal is to run a SLAM simulation using NLS optimization as the backend and vision as the front end. A dead reckoning signal (dr, red) is generated using an IMU (with noise) and feature point...

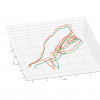
The below figures show the ground truth (gt, black), a noisy dead reckoning signal (dr, red), and an NLS optimization using the noisy dr as a seed, and IMU data to constrain relative motion. The above figure shows all trajectories, and landmarks (lmk, navy) and feature points (plmk, green). ...
error.pdf result_2.pdf I implemented the EM based SLAM algorithms. However, in a visual inertial system, we can to take care of other realistic issues besides the theoretical algorithm itself. It will be insightful to compare the optimization based algorithm, since it has been developed for a wh...
Currently working on the first step of a simulation for Tsang-Kai's SLAM project. A simulation will help verify landmark accuracy among other things beyond what can be demostrated using datasets. Ultimately we would like the simulation to look like the below figure [1] . The simulation setup...
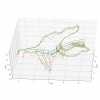
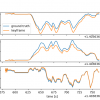
Optimization-based SLAM From the pre-optimization (blue line) to the post-optimization (orange line), we can see that the optimization method enables the loop closure effect. The key improvement lies in the better computer vision techniques by discarding possibly erroneous keypoints. Also, the...
Previously, I finished the feature matching and id assignment in the SLAM frontend. Last week, I combine the result with the preintegrated IMU data to formulate an optimization problem. Initial values I initialize the landmark position by triangulate two frames. The selection of these two points...

okvis is a visual odometry. Therefore, the feature matching only occurs within short time window, and the feature matching that enables loop closure is not provided. The following is the overview as well as the result of the feature matching that I implemented. Keyframe selection This part relie...
After surveying several SLAM and visual odometry implementation, I decided to work on okvis with monocular camera setting. I will run an nonlinear optimization on the output of the visual odometry system, which can be regarded as global bundle adjustment with IMU constraints. The output of visua...
For 3D navigation systems, representing the orientation is always annoying. After going through several painful learning and debugging processes, I share some lessons that I learned. The quaterion parameterization There are several ways to represent a 3d orientation. In real system, everyone pre...