Last week, I explained why typical distributed gradient descent leads to inexact solution, even though the convergence rate is linear (in log scale). There is a very important paper that shows that we can in fact have exact solution by incorporating the previous gradient. This algorithm is called...
What DARPA wants: Independent derivation of action and tasks within a team with limited or degraded communication is critical but not explored. DARPA desires efficient, bundled perception, localization, planning, and control algorithms for small robots to move rapidly and accomplish a multi-robo...
We studied the cooperative localization algorithm in multirobot systems before. However, when we want to apply the algorithm in the realistic multirobot system, a lot of realistic issues need to be addressed. One of the critical issues is the assumption in communication. Wireless Communication and...
I have been look up for programs in NSF that our lab can possibly submit to. Before starting, NSF listed 10 big ideas that guide the research direction! program link The Emerging Frontiers in Research and Innovation (EFRI) program https://beta.nsf.gov/funding/opportunities/emerging-front...
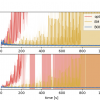
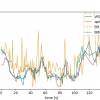
We simulate the BOEM algorithm against two other offline algorithms. Since these two algorithms requires a long time, we simulated them with sliding windows. In the first scenario, the block size of BOEM started with 9 sec, and grows geometrically. The sliding windows for both EM and optimizati...
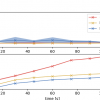
We simulation these SLAM algorithms with increasing duration. We can see that the estimation accuracy is comparable among 3 SLAM algorithms, but the processing times are different. The processing time is basically dominated by the optimization problem. The bigger the optimization problem, the long...
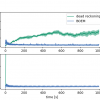
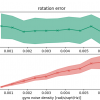
Following up with Alexie's post last week, we furthermore show that the simulation of BOEM SLAM algorithm for 1000 sec. The result is the average of 5 trials. The computation times for other algorithm, including optimization based and the EM SLAM, are too large for 1000 sec, but we have the comparis...
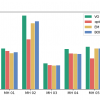
We compare 3 different SLAM algorithms on EuRoC datasets. As for estimation accuracy, we can see that all SLAM algorithms can improve the accuracy upon the visual-inertial odometry VIO output. The optimization SLAM has the most consistent result, while all SLAM algorithms have comparable perform...
The optimization based SLAM formulate the optimization problem with two kinds of constraints. First, the pre-integrated IMU error establishes the constraints between two spatial states, or two poses. The other one is the reprojection error that links a spatial state and a landmark. In the optimizati...
We are now able to demonstrate that the performances of EM-based SLAM algorithms are comparable to that of optimization-based. However, it is not easy to observe that same thing in the real-world dataset. simulation result The first challenge is whether to use IMU data or to only use the output...