In the paper of multirobot cooperative localization analysis [1], they discussed two cases: observable and unobservable. The former leads to a stable estimation, while the later does not. In the paper, they uses extensive calculation to delineate their result. However, such outcome can be easily exp...
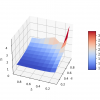
The interpretation of covariance intersection is based on its assumption of Gaussian distribution. Or we have to draw the covariance ellipse to illustrate the variation of such fusion. However, what happen to the fusion of other distribution? In this paper, they formulate the combination of prob...
I primiarily did paper survey on the papers following Diffusion Kalman Filter, in order to characterize its performance in the persecptive of network topology. On the way of surveying, I found that there are two main research groups in this field. The first on is lead by Dr. José M. F. Moura. One...
We have already proposed a multirobot localization algorithm that separates communication and observation as two independent mechanisms as well as keeps the estimation consistency. However, while localization is not the main goal but the support of more high-level tasks in most of the robotic system...
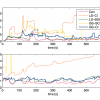
I went throught the main reference [1] in my following project, as well as studied the corresponding area, which is called optimal scheduling in sensor networks. In [1], the main work can be decomposed into 4 steps: Discrete time Riccati equation: With observation and propagation, the localiz...
This week, I finally decided my project for this summer with Prof. Mehta. Based on the framework that we developed for cooperative localization, we further consider how to optimize (or minimize the cost) this process with constrained resource. This paper may be the most related one, and I will f...
In this quarter, we finished this project aiming to provide a localization algorithm for multi robot system. First of all, we proposed a new algorithm that separates communication as an independent mechanism. By doing so, the algorithm is more robust to communication imperfection. In addition, in...
We have been expecting the lab open house for so long. Finally, the lab is finished. There were so many people in that day, and it was a challenge to share the research progress with someone without EE/CS backgroud, like the architects of the lab. It is particularly difficult for me, since my post...
Literature review: Analysis of Unprotected Intersection Left-Turn Conflicts based on Naturalistic Driving Data Summary: In this paper, unprotected left turn across path - opposite direction (LTAP/OD) events are studied based on data from Vehicle-Based Safety Systems (IVBSS) Database. To collec...
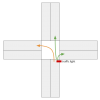
Motivation intersection is the bottleneck of urban traffic intersection is very different from the highway, which means that the highway model may not be applicable Model role of traffic light assign access to different lanes We can just consider one direction first. The other direction...