okvis is a visual odometry. Therefore, the feature matching only occurs within short time window, and the feature matching that enables loop closure is not provided. The following is the overview as well as the result of the feature matching that I implemented.
Keyframe selection
This part relies on the okvis. The following images are all keyframes.
Feature matching
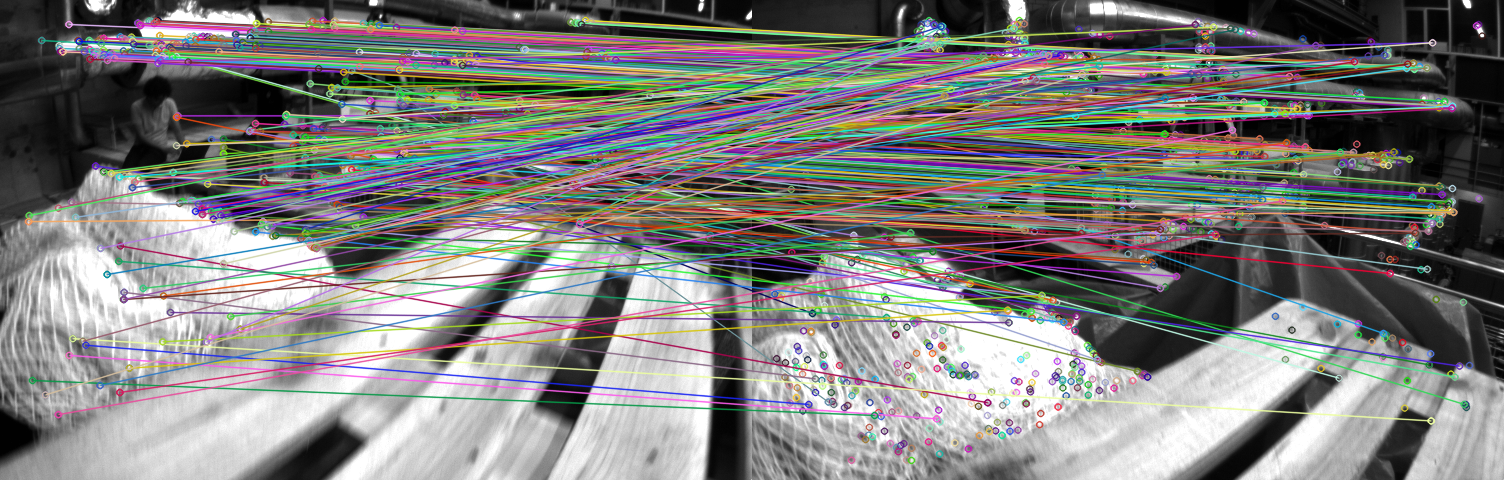
Raw matching
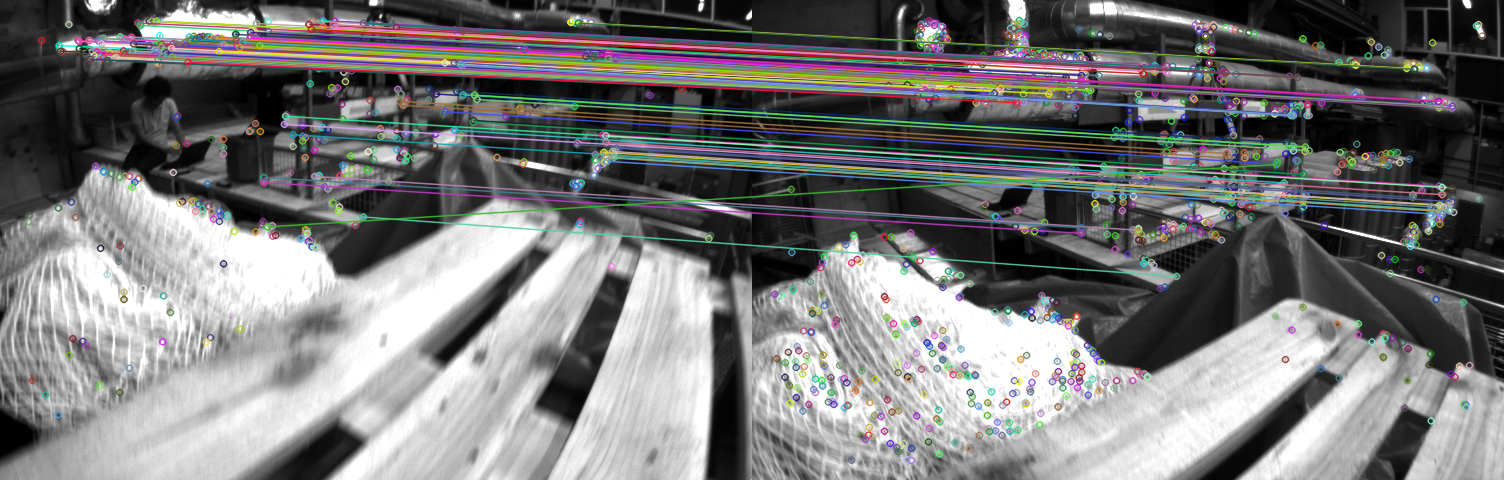
Matching with small distance
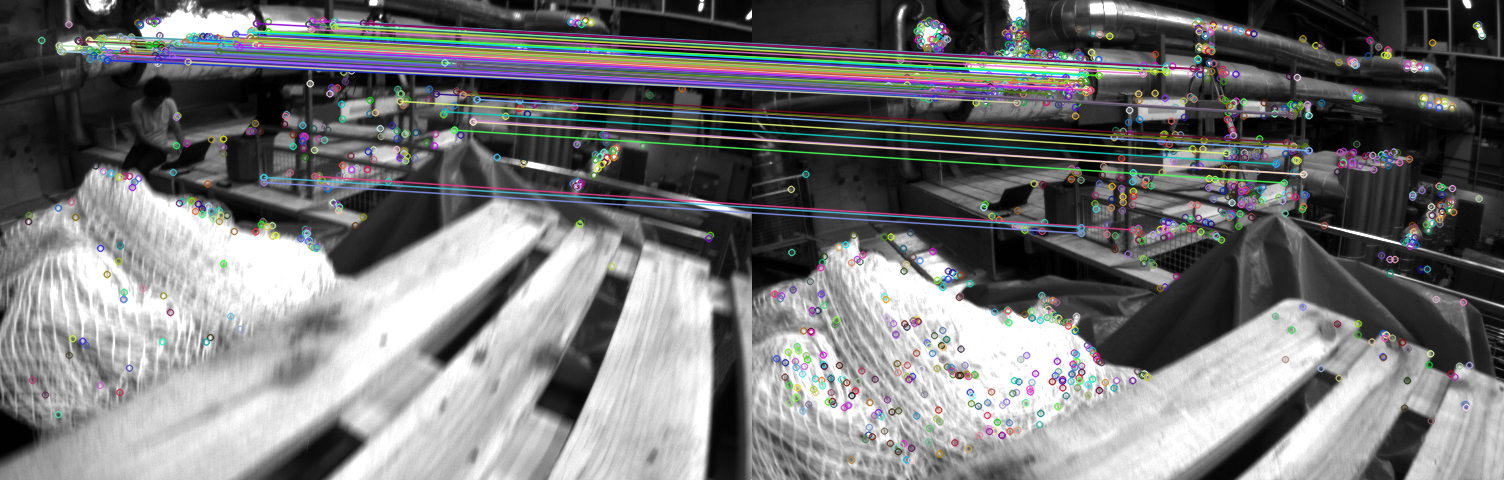
Mathcing with RANSAC
The quality of feature matching is essential to the overall SLAM performance. In this version, there are three steps to quarantee the quality of feature matching. There are some technicality to remove erroneous mathcing.
Feature observation output
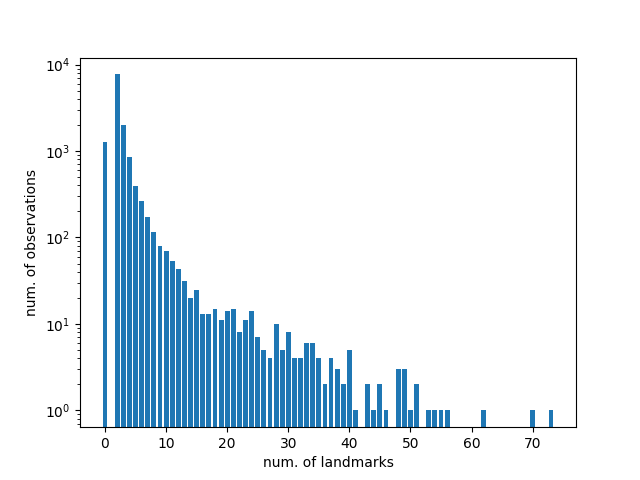
Currently, the optimization solver can not handle all the feature observations, which sum to 60,000. We may want to only consider landmarks that are observed frequently enough. This plot gives us a overview about the relationship between this threshold and the resulting observation number.