After surveying several SLAM and visual odometry implementation, I decided to work on okvis with monocular camera setting.
I will run an nonlinear optimization on the output of the visual odometry system, which can be regarded as global bundle adjustment with IMU constraints.
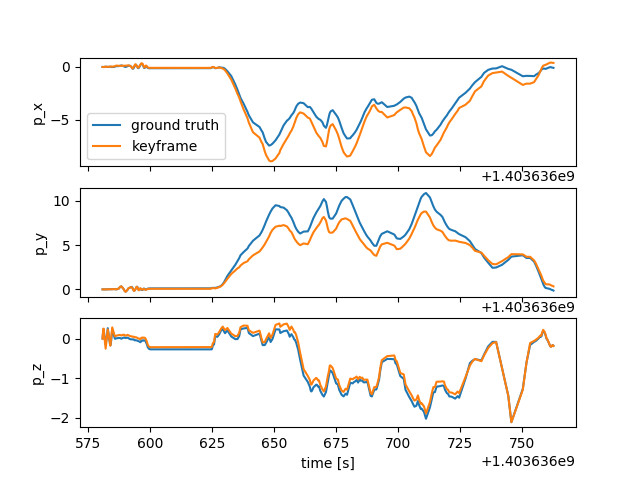
The output of visual odometry system constains the initial trajectory estimate and the initial landmark estimate. Currently, I obtained the initial trajectory estimate. The comparison to the groundtruth data is in the following. (Keyframe stands for the output of the visual odometry system.)
Nov. 30 - Dec. 4
goal: explicit landmark estimate for optimization initial seed deliverables: landmark estimate from visual odometry
Dec. 7 - Dec. 11
goal: a NLS SLAM demo with correct I/O deliverables: a compilable and workable NLS SLAM backend task: combining all measurement information and VO estimates
Dec. 14 - Dec. 18 (CDC week) goal: an entire NLS SLAM demo deliverables: a NLS SLAM backend with reasonable performance task: modify the previous SLAM code with correct parameters
Dec. 21 - Dec. 25
goal: the E-step of the EM SLAM deliverables: an RTS smoother implementation task: use the odometry and image measurements to realize RTS smoother
Dec. 28 - Jan. 1
goal: the entire EM SLAM demo deliverables: a EM SLAM demo with reasonable performance task: combining E-step and M-step