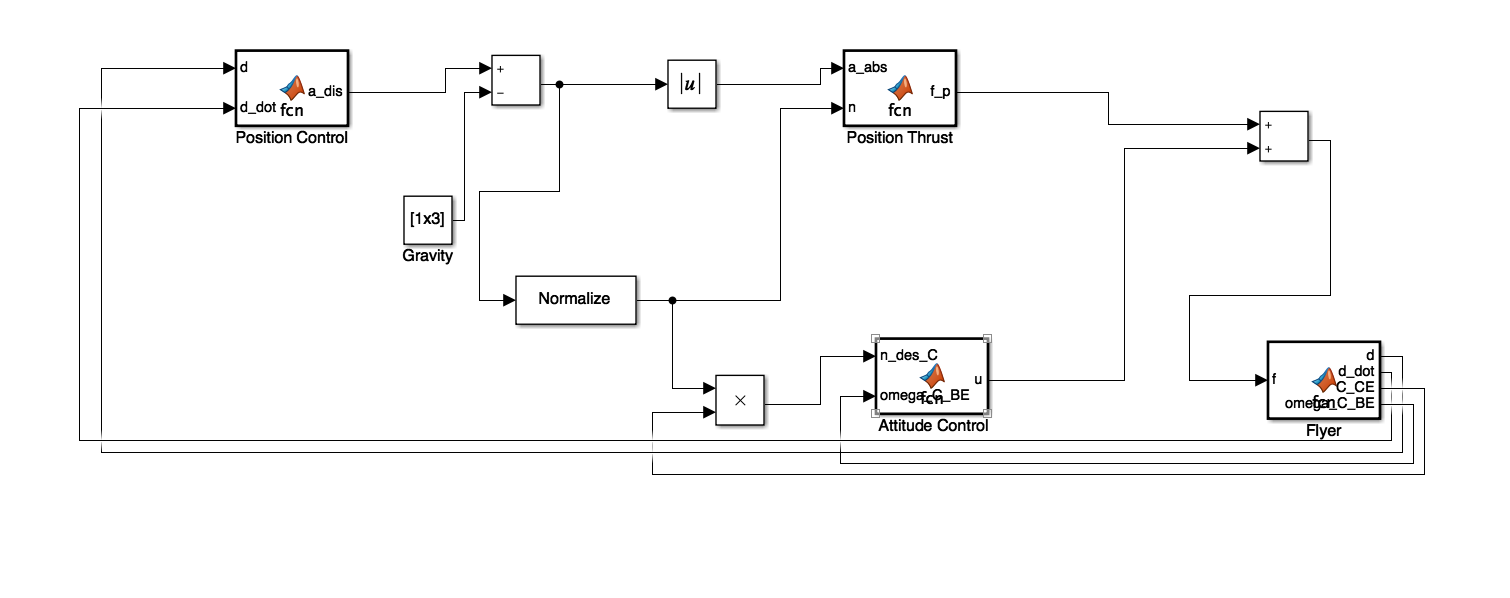
The control loop has been implemented in Simulink. The physics and attitude controller are yet to be finished.The total required thrust comes from two sources: the thrust from the position controller and the thrust required for the attitude controller. The following image shows the control loop in Simulink.
The control loop has been implemented in Simulink. The physics and attitude controller are yet to be finished.The total required thrust comes from two sources: the thrust from the position controller and the thrust required for the attitude controller. The following image shows the control loop in Simulink.