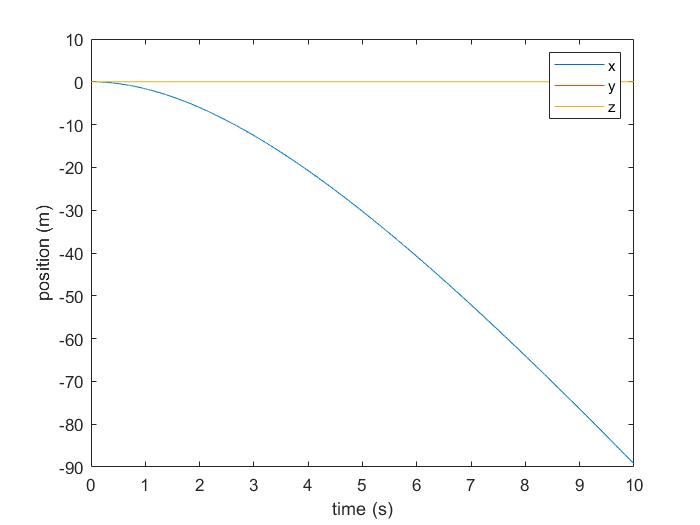
For the past two weeks I have been examining the dynamics model in MATLAB. I separated the linear and angular state variables. When setting the angular velocity of the body to zero and the initial pitch angle to 0.3454 rad, the flyer is able to maintain its position in both y and z directions, while accelerating to the negative x direction.
 When setting the angular velocity of the flyer body to the hover solution, the flyer is still able to retain its position, but small deviations can be seen, since the hover solution is not exact.
When setting the angular velocity of the flyer body to the hover solution, the flyer is still able to retain its position, but small deviations can be seen, since the hover solution is not exact.
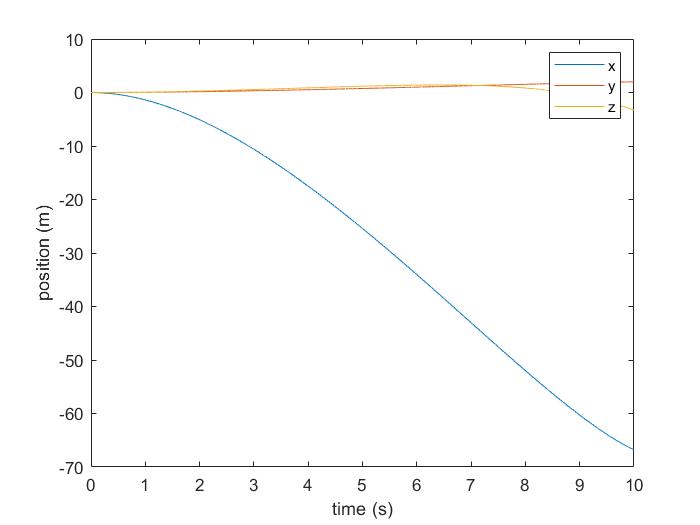 Overall, the linear position calculation has been verified.
Overall, the linear position calculation has been verified.
For the past two weeks I have been examining the dynamics model in MATLAB. I separated the linear and angular state variables. When setting the angular velocity of the body to zero and the initial pitch angle to 0.3454 rad, the flyer is able to maintain its position in both y and z directions, while accelerating to the negative x direction.
When setting the angular velocity of the flyer body to the hover solution, the flyer is still able to retain its position, but small deviations can be seen, since the hover solution is not exact.
Overall, the linear position calculation has been verified.