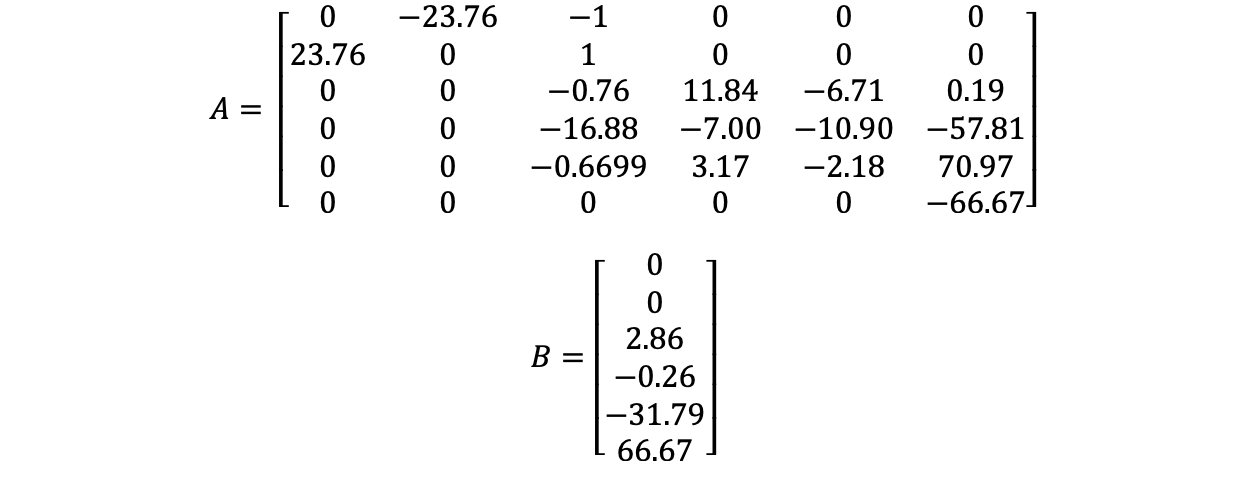
The control frame is changed such that in the control frame, the propeller lies on the xz plane. The resulting linearization matrices are:
Now because the model often crashes with singularity points, it is necessary to convert the Simulink model to a MATLAB script for debugging purpose.