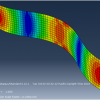
I have implemented linearization and LQR controller in the attitude control block. Previously, I tried to test the correctness of the dynamics block by trying to maintain hover after initializing the flyer at a hover posture. However, the flyer is only able to maintain the position for 06 seconds. B...
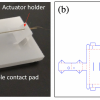
For the past week, I was woking on the writing the introduction for the upcoming RSS conference. In this paper, we will introdce our work on the modeling of our mechanical logic. This model uses a quasi-static electromechanical scheme to simulate the dynamic behaviors of our mechanical logic, which...

References: Zhang, W., Mueller, M. W., & Dandrea, R. (2016). A controllable flying vehicle with a single moving part. 2016 IEEE International Conference on Robotics and Automation (ICRA). doi:10.1109/icra.2016.7487499

This summer, I, along with Phipson, did a "design for everyone" project, which is to say, we built a system called FAVECAD (Fabrication in Angumented and Virtual Environments for Computer-aided Design) to help everyone (including non-designers) to design. This system combines advantage of AR and...
So far, the Mechanical Logic team has completed their first paper and submitted it to ISER2018 (2018 International Symposium on Experimental Robotics). Thanks for the hard work of Dr. Mehta, Angela and Blaire. The team is able to induce current oscillation through the combination of Bistability...
Hello Folks! This time, I am going to blog about my adventures with wheel encoding. I had a few problems (as usual) but solved it as I always do. The IR sensor I used was from Pololu, and I had to CAD out the encoder mount so that the rear wheels of my RC vehicle could be properly measured for wheel...

For our "off-center spinning mass controller" project, we wanted to control Crazyflie and run several different experiments on our drone. Ubuntu and ROS packages provided us with such platform. So we followed below paper as our guide. Flying Multiple UAVs Using ROS Since our Ubuntu and ROS version...
Below is the diagram of current camera configuration separating camera network from Internet in order to prevent any interference. Data interference is more likely to happen if additional cameras were added and they were on the same network as internet. (camera data can take up large bandwidth) : ...
Hers is the demo for full system testing v2 of our SLAM Physical Experiment: 2 robots and 3 landmark with better animation colo_full_test_v3 (1).mp4
As we near the end of this summer, Emily and I decided to compile everything we have done so far into one concise document. I made some instructions on how to download the software and upload the code to the car's microcontroller, which can be found in the document. I also included the lesson pl...