
Here's an additional Figure 8 performance done by adding flow deck to our lovely crazyflie. Crazyflie wishes you a happy demo day :) Link to the demo
All the related codes for Crazyflie project is now on our gitlab: Crazyflie_ros This is a cloned version of whoeing's crazyflie repository with modified launch files compatible with our motion capture system vrpn_client_ros This is the modified version of vrpn_client_ros package that does t...

This week, while I was writing a python script to generate a trajectory for crazyflie I realized the extrenal position data is not published properly. This command that generates rqt_graph helped me to visualize the published ROS nodes connections and to fix my code. Now applying the optitrack data...

This week we successfully performed the autonomous hovering of crazyflie. The details of the process are mentioned in this file , which is the continuation of "Installing ROS packages on Ubuntu" that I posted earlier. Here is a short demo. Next week we will use external position publisher to set...

Autonomous Hovering of crazyflie using ROS and Optitrack: As a means to get position data from Optitrack on the Ubuntu server controling the hovering of the crazyflie We are using the vrpn_client_ros package: Since it is a new package we modified the launch file from whoeing's repository he...
This quarter I will be working on: The set up of Crazyswarm (Flying multiple crayflie drones) autonomously using Optitrack motion capture system. The dynamics and mathematical derivation of our last quarter project "The off center spinning mass controller" for quadcopters. Attached is my mile...

For our "off-center spinning mass controller" project, we wanted to control Crazyflie and run several different experiments on our drone. Ubuntu and ROS packages provided us with such platform. So we followed below paper as our guide. Flying Multiple UAVs Using ROS Since our Ubuntu and ROS version...
Below is the diagram of current camera configuration separating camera network from Internet in order to prevent any interference. Data interference is more likely to happen if additional cameras were added and they were on the same network as internet. (camera data can take up large bandwidth) : ...
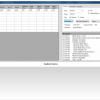
Data streaming on motive can be done in several different ways such as: Loop back when data is streamed and used on the same machine Data streamed on to a virtual machine installed on the same computer Two separate computer under the same network For the purpose of our project option 3 was i...

Here in below video we put the precision of Optitrack motion capture system to the test. After calibration the system claimed to have only around 0.4 mm of error and as shown in the video we tried to verify this claim. Optitrack data acquisition precision