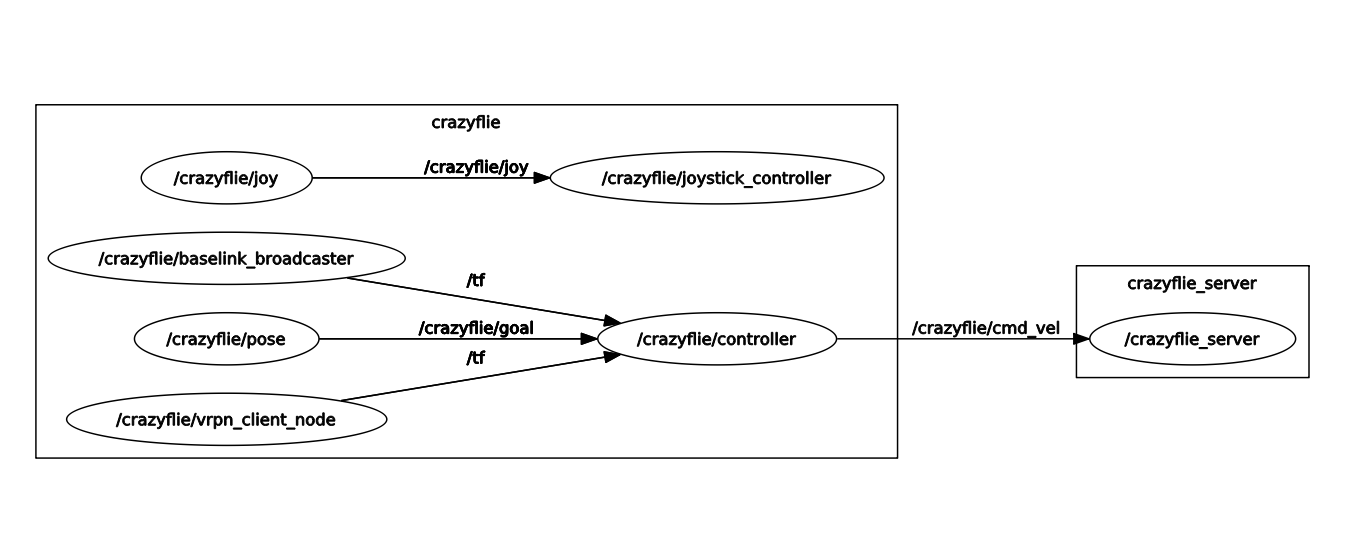
This week, while I was writing a python script to generate a trajectory for crazyflie I realized the extrenal position data is not published properly. This command that generates rqt_graph helped me to visualize the published ROS nodes connections and to fix my code. Now applying the optitrack data the plan is to use the generated python script on a ROS launch file and test the results again.