 Autonomous Hovering of crazyflie using ROS and Optitrack:
Autonomous Hovering of crazyflie using ROS and Optitrack:
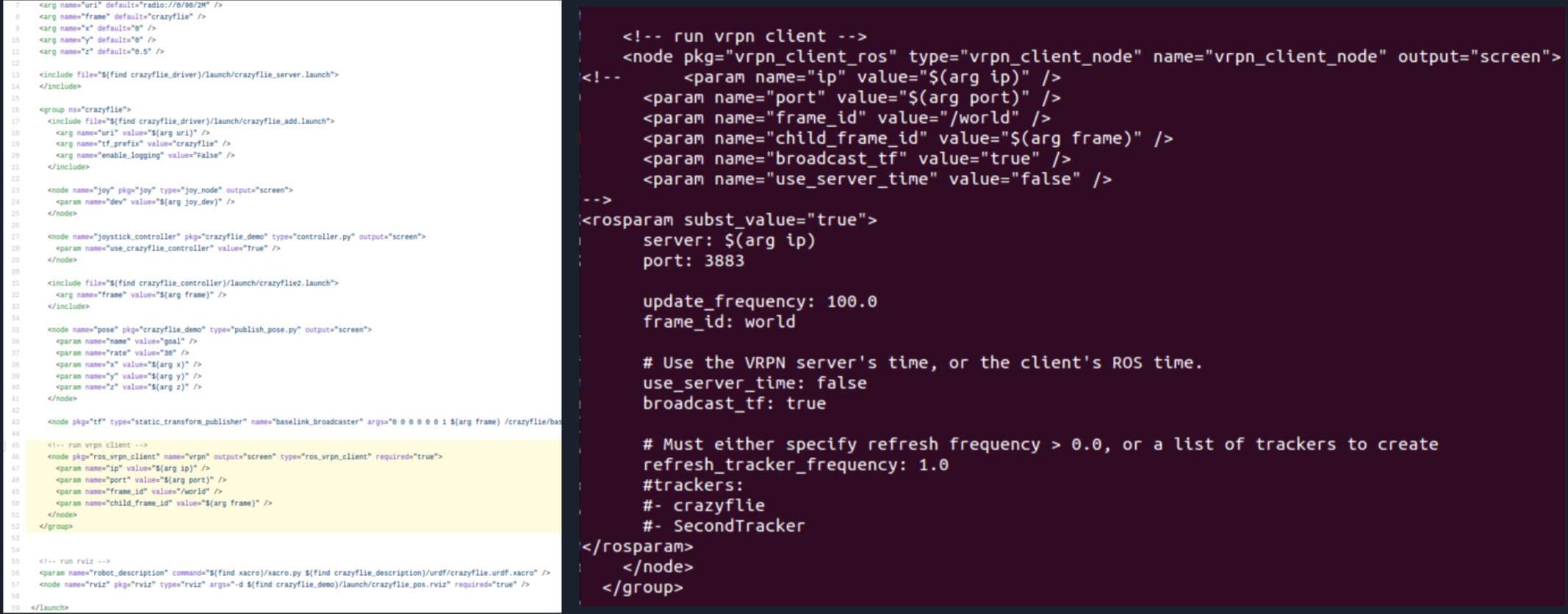
As a means to get position data from Optitrack on the Ubuntu server controling the hovering of the crazyflie We are using the vrpn_client_ros package:
- Since it is a new package we modified the launch file from whoeing's repository here is the link to our version implementing the vrpn_client_ros package:
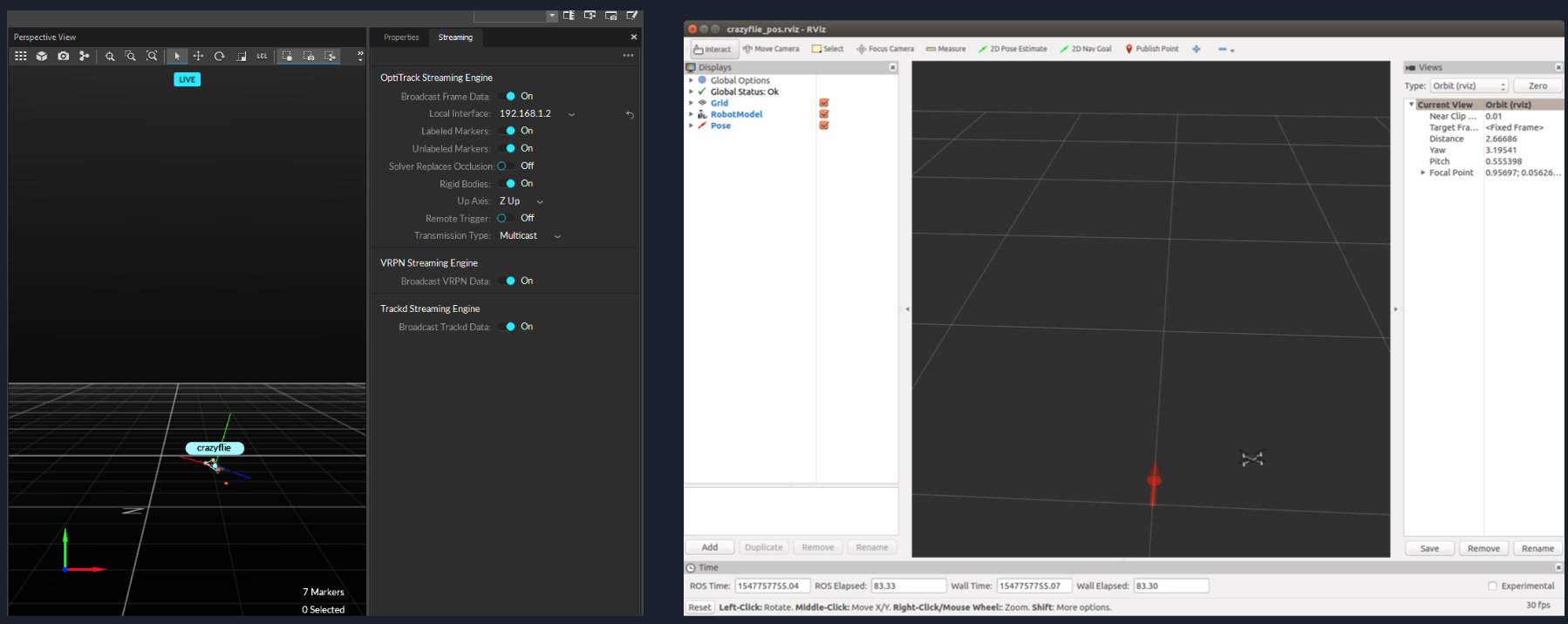
- Coordinate system alignment:
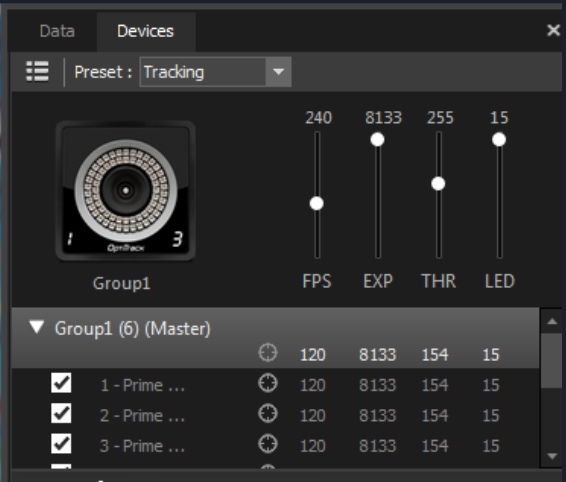
- Optitrack issues:
- Not providing Robust tracking
- Threshold and exposure features of cameras are important
- Sensitive to ambient light (better performance in the darker settings)
- Optitrack error Analysis: (To do)
- Crazyflie current hovering falied tests
