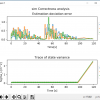
I've successfully gotten the pre-generated data simulation to run correctly for robots moving in a straight line. I used the already-built animated plotting api to view the results in addition to looking at the analyzer outputs. During the debugging process, we discovered that the simpleEKF algorith...

As an alternative actuator for mechanical oscillator, I found SMA wire actuators. SMA wire actuator is a linear actuator that has the similar function to the SCP actuators. I decided to test the practicability of SMA actuator as an actuator of the mechanical oscillator because there are some advanta...
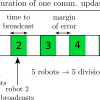
The RFM69HCW radio modules that we plan to use for CoLo PE are only capable of half-duplex communication, meaning that it can either transmit or receive packets but not both at the same time. In a typical setup, this issue would be addressed by either setting the modules to automatically retransmit...
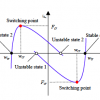
Based on what happened in the experiments, we found that there may be some other definitions of snap-through other than reaching the critical switching point, depending on whether the system is under force control or displacement control. For this reason, new model of the mechanical logic system mig...

The previous design of mechanical logic has rather low fabrication tolerance, though it works. Here, in order to improve its error tolerance, I created a new desgin with switches on the bistable beam. Theoretically, this design also has much high robustness. I will test this design and run debugging...
This paper reviews several implementations in artificial intelligence that have neuroscience correspondence. The most robotics-related one is the neuro-replay. In RL, especially navigation related tasks, the performance will be better if the agent stores a certain amount of raw data. The data will b...
Improved algorithm with direct observation: Debugging on why range-bearing measurements failed: Attempted algorithm with range-bearing (perfect rnb observation, noisy time update): Attempted algorithm with range-bearing (noisy rnb observation, perfect time update): Still, problem...

Current Progress on Offset To date, the offset connection is able to build a multi-level bookshelf with all finger joints properly added on all edges. This bookshelf would be buildable with lazer cutter and wood. The current implementation is based on the original addConnection() function. I add...
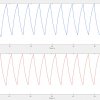
Last quarter I finished building the model of the oscillation period of the mechanical logic in one single snap-through motion. This week I studied the periodic motion of the system and found that as the oscillation becomes stable, the oscillation period tends to decrease over time before converging...

For previous two weeks I was building up the framework of EM-SLAM. The framework is showed as following: And as well as the demo by using direct observation (states can be directly observed with gaussian noise): This demo works properly as expected (although there are some discrepency betwee...