
This past weekend we were able to do a complete test run of CoLo-PE that we’ve spent the last quarter updating with new changes. The most notable addition is the new communication module which collects data about the received signal strength and the link quality (based on the number of dropped p...
This week I worked on finishing up preparations for the test run of CoLo PE that will hopefully happen this Friday. Last week I opened up a new Create 2 robot to test how well using circular flat retro reflective stickers would work as a substitute for the official Optitrack markers or our 3D prin...

After wrapping up testing the accuracy of NTP, this week I worked on creating new Optitrack Markers for the two new robots and landmarks we plan to add. Creating our own custom markers provides a cheaper, faster, and more flexible alternative to ordering genuine Optitrack markers. 3D Printed Mark...
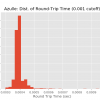
Last week I tested the ping between computers on the same local network and found that the round trip time of a packet inconsistently ranged between 3.4 ms to 588 ms. Typically, packets sent within the same local network should be less than 10 ms, but for some unknown reason the latency in our netw...

In my last blog post, I described an approach for synchronizing the broadcast intervals of the RF modules in the network based on the system clock. In this blog post, I’d like to compare and contrast this open-loop approach with an alternative approach to synchronize the modules in lock-step. Both...
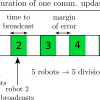
The RFM69HCW radio modules that we plan to use for CoLo PE are only capable of half-duplex communication, meaning that it can either transmit or receive packets but not both at the same time. In a typical setup, this issue would be addressed by either setting the modules to automatically retransmit...
Returning to the problem of measuring the cost of different operations for robot localization, I revisited the Spirals research group's PowerAPI toolkit for software power meters. In the time since I had last used PowerAPI, it appeared that the research group had discontinued development of the too...
After revising our requirements, we decided that in addition to the received signal strength, we also needed to collect information on the link quality in order to better characterize the connection between two devices. Link quality is an important measure that indicates whether or not a message se...

During Weeks 1 and 2 I worked on improving the way we started the robots CoLo-PE by moving from using Ubuntu's Remote Desktop solution to issuing remote commands with ssh. To emulate the functionality of the robot_full_run.sh script which opens up several xterm windows each running a different ROS...
These past few weeks my role has been to add networking/communication to CoLo-PE (CoLo Physical Experiments). Previously when evaluating the performance of a localization algorithm, CoLo would infer the connection strength between each of the robots from the relative distance between each of them (...