
Throughout this past week, I was able to use all the knowledge collected from the previous weeks which I have discussed in my previous blogs and generate a table that lists all the I2C communication which happens sequentially between the microcontroller and the Vl53L1X sensor. I added Serial.print f...

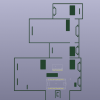
I investigated the light interference in our lab this week, from this picture, we can clearly see the two bright light dots at the center of the floor. On camera 4, the net is also included in the view of the camera, that's why we can see a bunch of light dots on that view. The two images are the sa...
Importing a drawing into KiCAD is easy for simple mechanical design, but additional requirements of drawings are needed if the design is complicated. This blog is showing attempts I have tried to fix the issue. pipeline confirmed: Build symbol and footprint library for all required electrica...
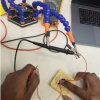
The goal of this investigation was to figure out how feasable it would be to allow real time input gathering without the use of any external sensors. My initial attempt was the use the change in resistance from placing a finger on the conductive material, however I was not successful as the change s...
SEtup the system with roomba running while motive is capturing the motion of roomba. We can see it's precisely capturing the motion. Next task for me is to create a stage for roomba operation and capturing the motion with 3D map. We decided to do this on weekend since we need to turn off most of the...
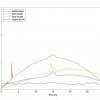
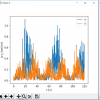
This is a SLAM performance analysis. I compared our OEM-SLAM with other three state-of-art SLAM algorithms, including EKF-SLAM, fast-SLAM and graph-SLAM. The first figure is localization error and the second figure is mapping error.

Our goal last week was to convert the boat chassis from an origami structure to a 2D template that was designable on RoCo. The template still needs to be made of one uncut sheet, like origami, so that water can't leak in through edges, but it can be folded from shapes other than a square. The first...

Boat 7 was created using a template that we made based on the structure of Boat 6. Our goal with this boat was to get an idea of the template we would use in RoCo. We also made new paddle wheels using hexagons instead of circles to simplify construction. Boat 7 was faster and went straighter than Bo...

I was able to figure out how to make the Roomba travel along the circumference of a circle or arbitrary size. It turns out that my issues with accuracy and consistency of control inputs were due to scaling of the linear and angular velocity commands. During a test trial, Xin and I found that even t...
As part of the trace through of Colo-AT (primarily the Simulated Dataset Manager), one of the issues that arose was the proportionality of the RMS to measurement distance. In other words, as the distane between the robot and the landmark it was measuring increased the assosciated error in estimating...