
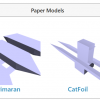
I have begun testing different designs for mounting servos and DC motors in any orientation and at any position on each of the boat hull morphologies, as shown in these photos: servoMountDesigns.pdf. I'm testing them by hand first (using tape and scissors), before sending them off to Jill for her...
Last week, I have changed the visual of the buttons as such: (before) (after) It was my first time coding with css style sheets and I thought it was pretty neat that most of the styling is strictly happening on css files which makes it a lot easier to code. In the future, I want to be able to...


Since I'm starting to test different configurations this week, it would be easier if we could change the control accordingly. Right now, I've successfully adjusted forward/backward/up/down control even people have messed up with the wire connection in the wrong way. This is pretty useful since in...

I'm testing different motor + propellers combinations since we change our control board to feather board esp32. And I will use feather board as the development toolkit in the paper, so it's necessary to test these combinations because the thrust and weight are the input parameters to our system. ...
For SURP 2021’s Week 5, I created a car in roco and equipped with a steering system. Last week, I made one that has a tank-drive system. Tank-drive system: Controlled using a Webpage -- Forward, Backward, Left, and Right buttons Steering system: Controlled using Sudarshan Seshadri's Dash (Rea...
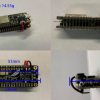
The feather board stack is a little bit heavy (22.3 g) so I tried the soldering way to assemble different motor board and esp32 feather board, which is only 14.55 g as shown in the following figure: The soldering stack mode is also lighter, which is 22.67g now as shown in the following figure, a...

We had learned from the non-ML-based ball detection algorithm that a color-and-contour-based algorithm cannot always detect the ball with enough accuracy. As a result, I have been developing an ML-based platform for training a model with multiple images of the ball and identifying a bounding box aro...
Last week, the engineering effort was focused on setting up the hardware and building the blimp and any other required electronic components. Initially, we couldn't set it up using the balloon that we bought from Amazon, so we had to reuse the blimp that was used in the previous tournament. Due to t...
Over the past week, I have been working on getting the dashboard to display video. As shown in this image, the dashboard can now do so. To do this, one can pass in JPEG binary data or base64 encoded JPEG images, which it will then display. I do this by having the OpenMV cam send this info to the...